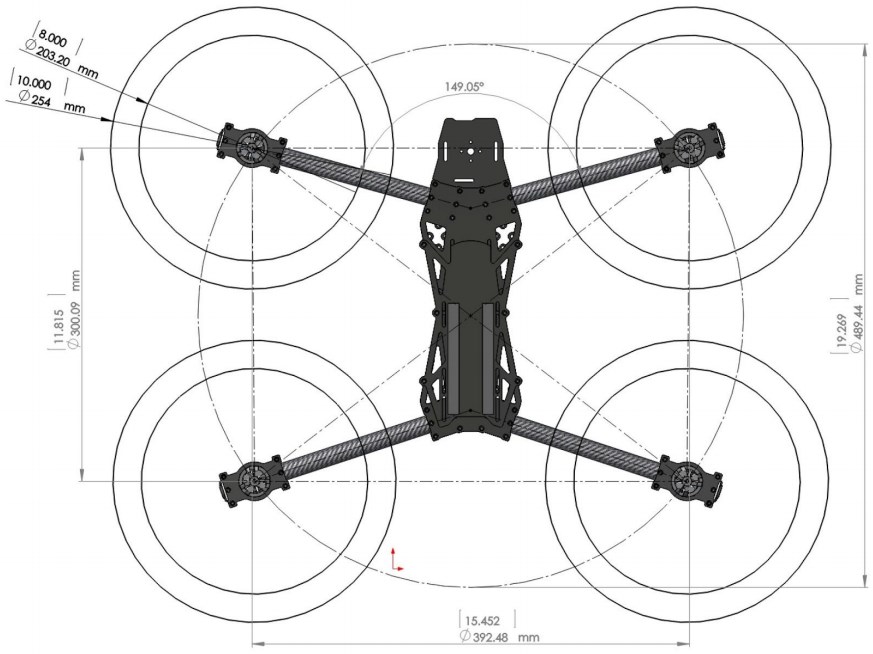
I am building this quad with a pixhawk cube 2.1 orange
i attached a photo of the quad frame called Hquad500 but when setting it up in aurdrupilot the V frame looks more like it, the motors for the V and H spin different based on the Ardrupilot frame setup, Anyone have the answer as to which i should use,
I used the V frame setup, Did all sensor calibrations and motor and esc calibration and all setup fine, had to reduce the gps default to both gps to calibrate ,
When i did my first take off the copter lifted off but immediately started to turn on the yaw axis to the right , so i set the quad back down , recal the radio and it did the same again
not sure where the problem is located, frame selection or PID settings
Need a little help
here is a link to the quad im using
Setup as a v frame all motors turn correctly and tested in mission planner all was good
Could changing the PID help if so how is that done and what is changed
Not sure of weight
This was first attempt to fly so , no auto tune yet
After that issue I started having a initialing APM message in mission planner when I tried to connect to the pixhawk not sure what cause that
I have the same frame. All the metal screws, some of which could have been magnetized, would throw the compass off and make it “toilet bowl” in GPS mode. Try it in stabilize mode and see if that help. I have mine setup as “V” frame not “H”. It flies fine now. Also, it seems to me that the magnetometer is more sensitive in the Here products than others. I had a DJI A2 flight controller on a large octo frame with no problems. Swapped out the A2 for a Cube with GPS in the same place on the frame and had compass calibration problems that I couldn’t get rid of.
Got the frame right , gps calibration good , gonna give it another try soon, lost a prop nut and can’t seem to fine a nut that will fit these motors
Thanks