Is it the Cortex folder?
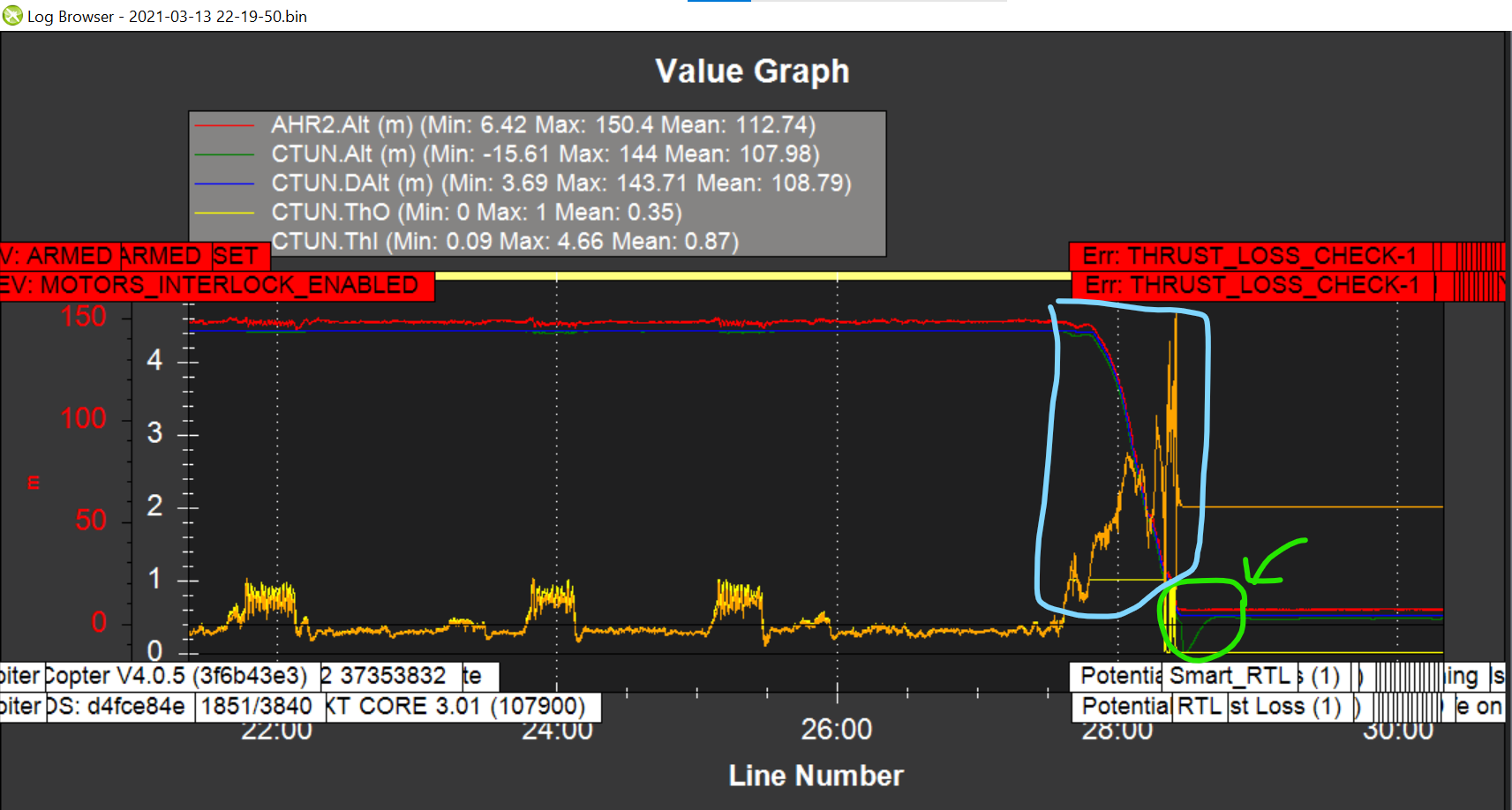
I think there’s some sort of motor mount or frame twist going on here, predominantly the CCW motors are working harder to counteract some physical yaw issue.
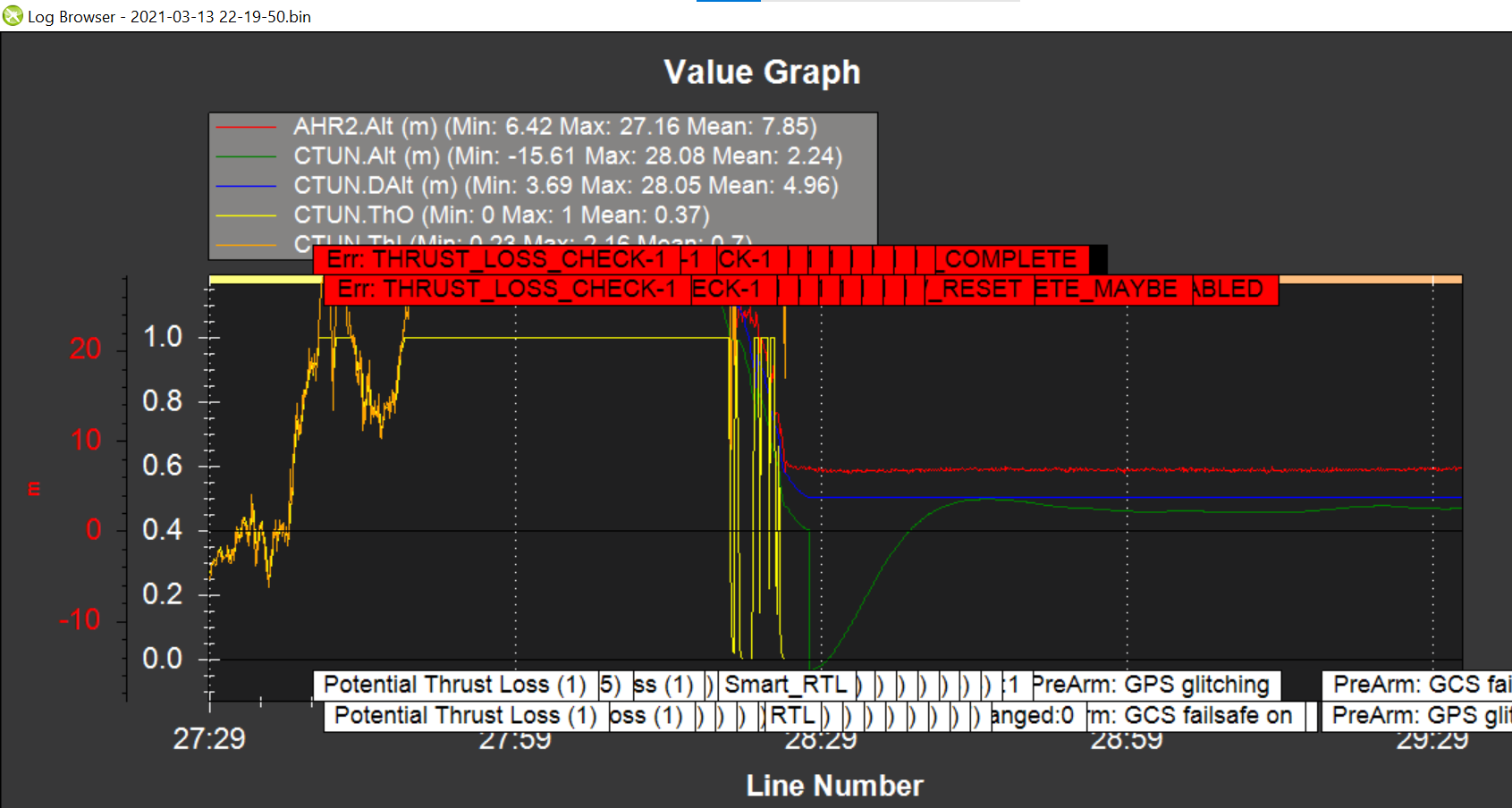
Since it’s relatively stable and not doing any fly-away, you could set these and it might help with the altitude issue too:
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.9518
PSC_ACCZ_P,0.4759
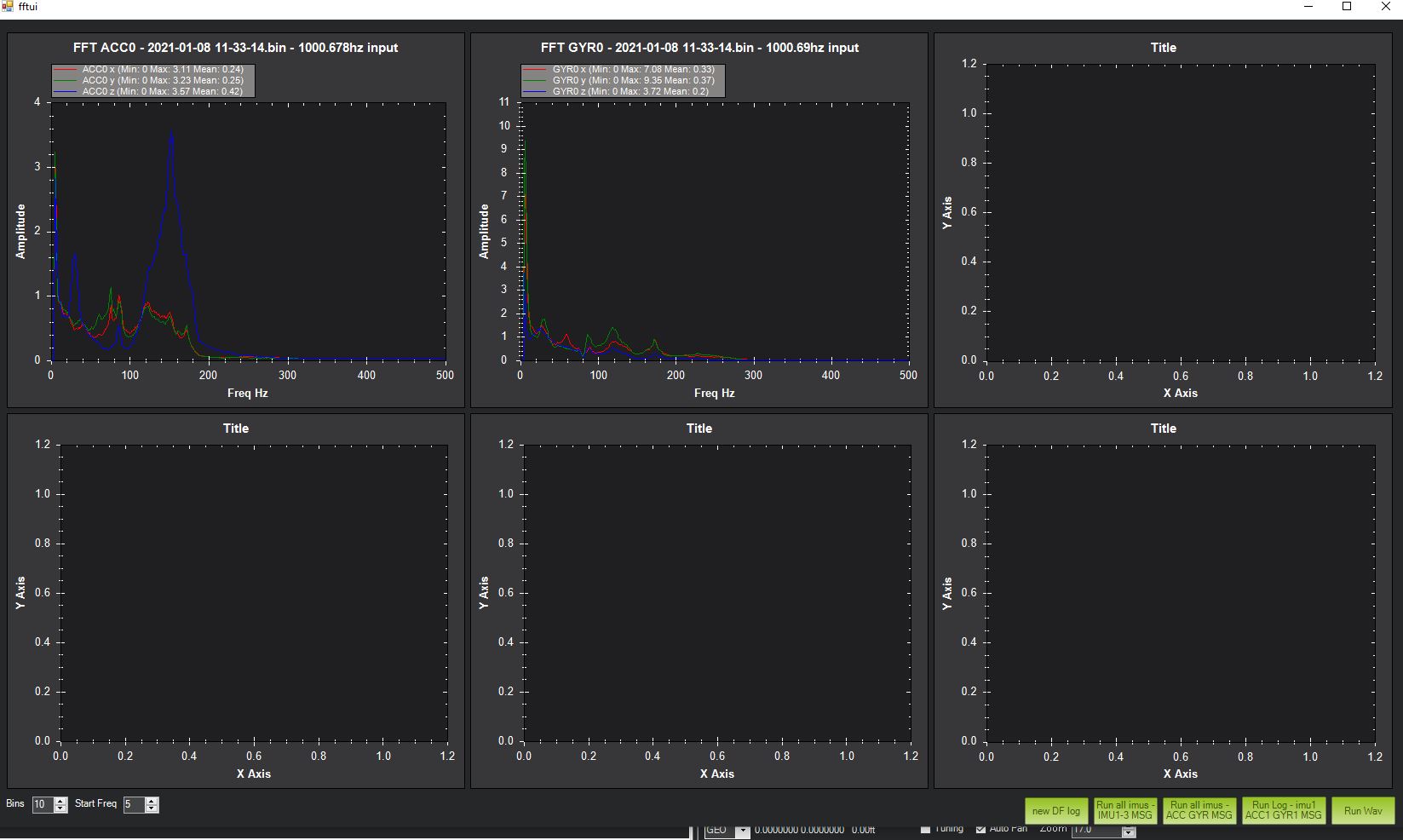
The Harmonic Notch filter looked a bit wrong, like for smaller props or you’ve chosen the wrong peak to base it on. Try these and retest:
INS_HNTCH_ATT,40
INS_HNTCH_BW,42
INS_HNTCH_FREQ,84
INS_HNTCH_REF,0.4759
Also I’d probably test with INS_ACCEL_FILTER,20 and maybe just lower it a little if you have to.
I would standardise to these:
BATT_ARM_VOLT,22.1
BATT_CRT_VOLT,21
BATT_LOW_VOLT,21.6
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
MOT_BAT_VOLT_MAX,25.2
MOT_BAT_VOLT_MIN,19.8
And for anything bigger than a small race quad, I would set these:
FENCE_ALT_MAX,120 ← set to suit safety and local laws
FENCE_ENABLE,1
FENCE_RADIUS,600 ← set to suit safety and local laws
FENCE_TYPE,3
it will make you wait until a home position can be set before arming, but that’s a small price to pay.
And see if GPS_GNSS_MODE,67 helps with time to 3D fix and update rate.
Attitude control could be a little better.
ATC_ACCEL_P_MAX and ATC_ACCEL_R_MAX could be reduced to 78000, but that’s not a big issue.
I suspect ATC_RAT_PIT_D and ATC_RAT_RLL_D could be a bit higher
or
ATC_RAT P and I terms lower in conjunction with ATC_ANG_PIT_P and ATC_ANG_RLL_P being higher.
But Autotune will sort all that out and should get really good results.
Autotune with the lightest take off weight, then when you add a payload change:
ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)