Hi everyone,
I am new to this, everything that contains Ardupilot, Pixhawk family, PX4, Cube, Pixhauk 2.1 and so on. There is A LOT of different names that is a unclear mess for me.
I have built two drones, without any support. Based on DJI Naza V2. Performs well, but the oldest had a fly away crash due to nothing. A lot of other users experiencing the same. Some people claims it is fixed in V2 - but it is not. Lets leave that shit for something better!
I do know Arduino in general and Alexmos gimbal solutions and handle it well.
But getting started with Cube eats up my time completely. A lot of frustration while following manuals and almost nothing is precise - just follow like trial and error and hope for the aircraft will work.
This is not the wanted experience. I think all manuals can be removed. Google and Youtube (MAD RC) are a lot more all covering and educational.
For this price tag, I expected a lot more pack up - install - calibrate - successfully fly. Like DJI is. One program, one solution, one manual.
When did I meant to be informed that Mission Planner was made for Windows 7 and not for Windows 10? I did send a bit angry email to Philip Rowse when I was feeling this is just to much errors everywhere. If so, why should I believe any word about reliability of the Cube?
Philip Rowse did tell me that Win 10 is only way to go and this email informed me about this Cubepilot forum did exist.
Then I saw the major issue with the sensors. Come on, isn’t that alpha/beta-thing to test that all these fancy IMU-sensors actually work?
Okey, let stop complaining.
After I did buy a Win 10 licence and installed it.
Then I did not get why I could not connect. Tried everything.
But, on Youtube I did found that I was actually meant to install a firmware, or maybe a bootloader. Then I did come to this:
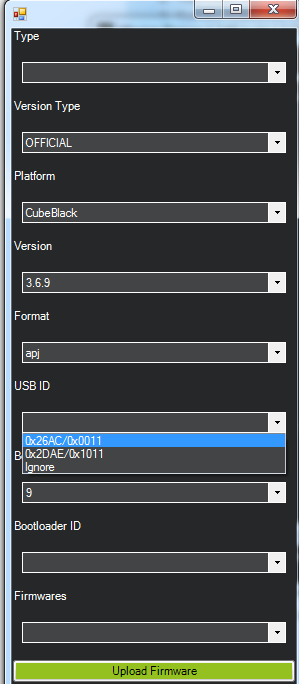
The errors here is two USB-id’s. Both is working. Why?
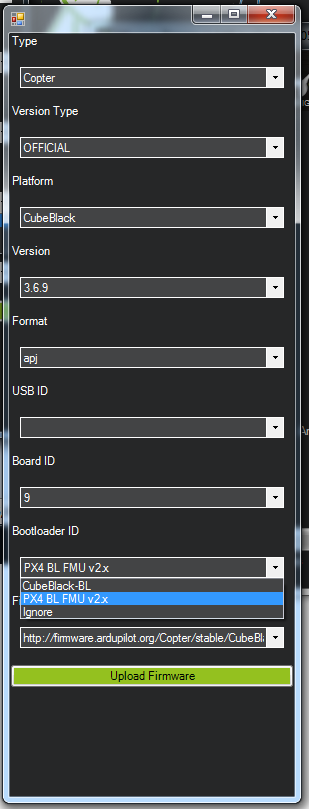
There are also an PX4 BL and CubeBlack BL. Why? I do not recognize the last one in any manual.
I tried to upload all four combinations. But all is accepted, put update is done does it say everytime except first time.
CubeBlack does not overwrite PX4 to be more clear. I do not know what I am doing.
How do I know what I would like to have?
Why there is one QGS and Mission Planner, what is compatible with what? And pros and cons about everything?
Think I want the new thing symbiOS, (right name?) Not NuttX and the other one. I do not know why.
Is there a massive FAQ anywhere?
I do not like to continue, I building up anything on something I maybe don’t want.
Also, look and the picture on the right handed side.The boatloader link name is not visible, until maximize whole window. Good to see if it is heli or copter being made. Just random distracting example “should not be” for me.
Hexcopter, Alexmos gimbal, Futaba radio. 5212 T-motors. T-motors ESC. Black cube and here 2.
Best regards, thanks for any help,
Hampus
Sorry for being angry. But there is personal reasons of my not excising patience.