Still getting very frustrated trying to setup a gimbal to work in a reasonable manor. I posted a video on here of my ‘work around’ using multiple buttons to set the gimbal pitch to certain angles. Needless to say its very unsatisfactory.
The main problem is that the SimpleBGC (Alexmos), when working in mavlink mode will not work in pitch speed mode, just in absolute position. The scroll wheel is sprung loaded to return to neutral so therefore that’s what the gimbal pitch does.
The only options are
1 Do like I did and set up multiple pre-set gimbal angles on multiple buttons.
2 Re wire the connections to ‘RC’ mode, thus losing all the benefits that serial Mavlink flight controller-gimbal protocol gives.
If only the scroll wheel had a ‘integral’ mode where the value would stay where you pushed it to.
We are promised that Solex will fix all these niggles but Im getting worried by the lack of progress reports in this area. Perhaps in the meantime, a quick firmware change on the scrollwheel could be considered?
As a commercial operator Im really on sticky ground using a copter still in beta.
Considering going back to the Taranis.
That looks like the perfect work around. It should be an option on the scrollwheel setting. In the meantime how much? I just know as soon as I buy and install one, the next day Solex will be released .
Price is 70€, and it is available within few days. I just need to ask the manufacturer for some units.
It could be a good solution by waiting for the same kind of functionality on the herelink
@Julien
I just realised that thing won’t work unless I re-wire the gimbal to RC input, and if I did that then the speed mode would work anyway.
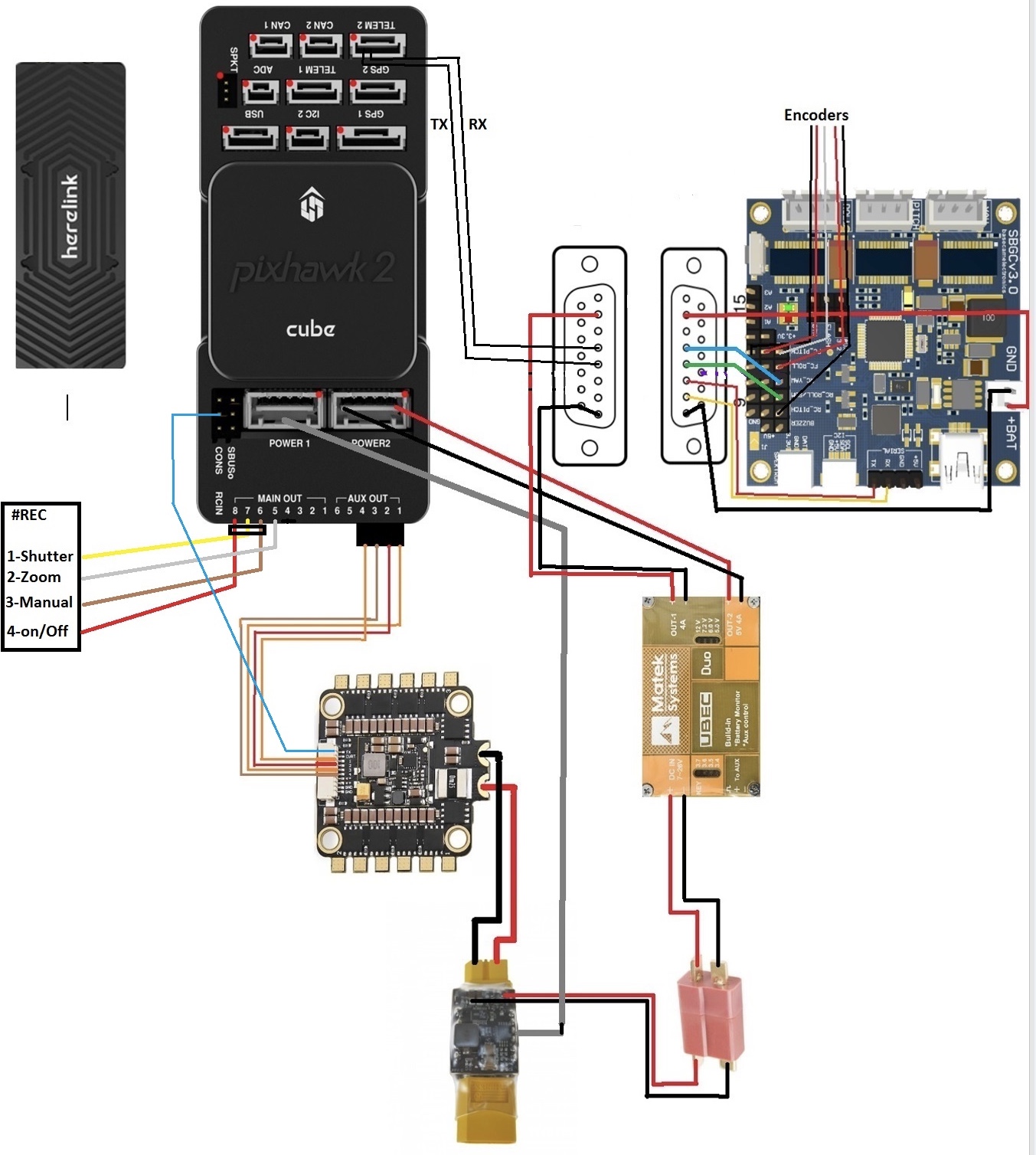
There is no servo line to insert your device, it’s all done on the telemetry TX/RX line.
Is that really true? I have a gimbal working which does holt position.
Anyhow, I think LUA scripting could solve this. Most likely also the issue of using the wheel for different axis.
You can use rc:get_pwm() to monitor a button and use this to switch between the outputs which you can then set by using servo.set_output (function_number, PWM). There might be some details to fix, but this should basically work.