I´ve got so many errors at the same time and in a such short time, I have search for some of them, and seem to be the EKF didnt was able to get the right altitude (I saw the log and I can see the ctun.alt was a little different from the baros.), but I dont know why this has to do with the GPS, vibrations (and I saw in the log the vibracion was not the worst it can be, I have flew other drones with worst vibrations and was perfect), etc.
The test was today on a very windy day.
If some one can give it a look will be great. Thanks!
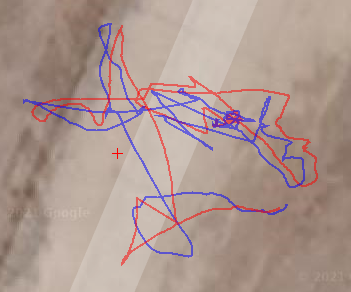
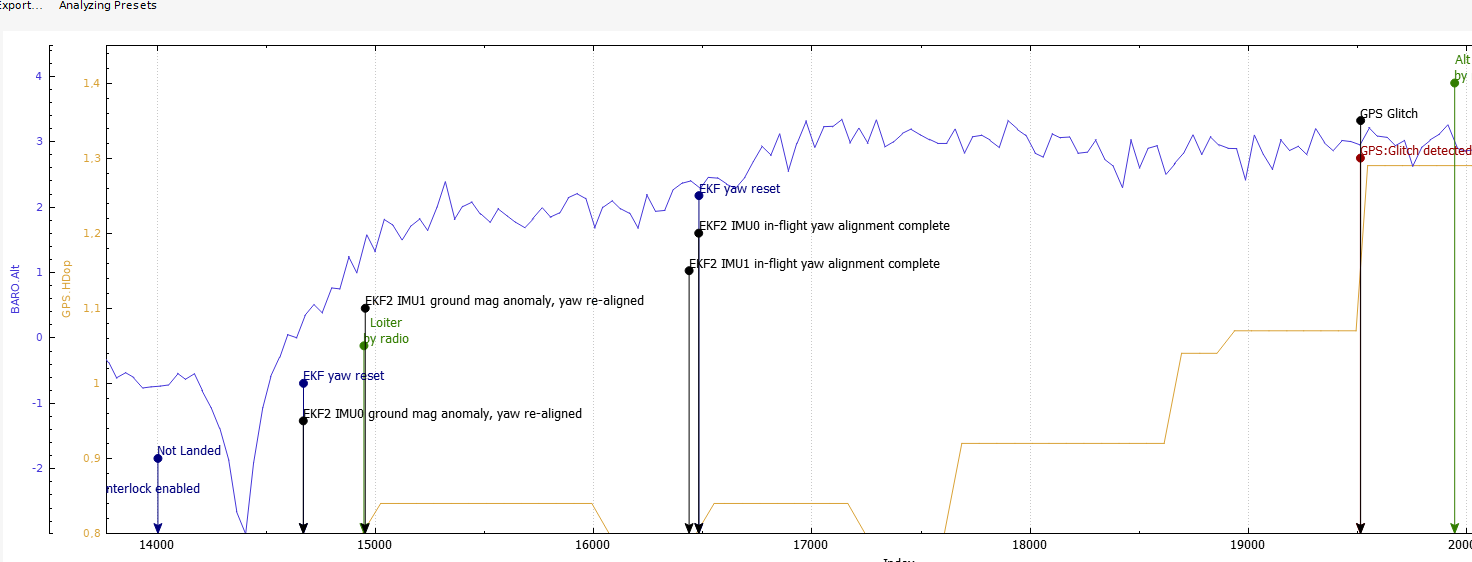
GPS HDOP is bordering on poor the whole time. The GPS position and calculated AHRS position are diverged nearly the whole time, although vibrations are low.
Try setting these to help the GPS situation
GPS_GNSS_MODE,65
FENCE_ENABLE,1
The GNSS mode will limit the number of constellations, and potentially improve the GPS update rate and accuracy. The fence settings will make you stay disarmed until there is a good 3D fix - yes it can take time but you get used to it and it’s much safer.
You could run Autotune and get quite a bit better attitude control.
You should set these params:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
The weight distribution its ok, it think those numbers are becauase of the wind, that day we had very heavy wind.
About the HDOP, yes is very odd, but strange because on the floor was ok, and the drone didnt move more than 20 meters from the takeoff point, and no more than 10 meters high.
Here is the takeoff part, you can see the HDOP is 0.8, and then start to went up
Hi Shawn, beside the GPS problem, why do youu think the drone warn about Vibration Compensation ON- OFF, the EKF 1 that couldnt initiate and the INAV error?