hey guys,
I have a Pixhawk cube orange with 4.0.3 and the GPS works only on CAN1. The GPS is attached and the parameters were changed to take the GPS input from CAN1 port but the carrier board doesnt detects a GPS it doesnt hold its position in position hold mode or loiter mode.
Mission planner telemetry shows that there is 3D fix and locked but the copter doesnt hold its position.
After callibrating it again the lights turned to cyan blue solid and still it shows 3D fix but no results.
can someone tell me with what is to be done in the params and also what if i want the GPS to work on GPS1 port. I am using Here2 GPS
https://firmware.ardupilot.org/Copter/stable/CubeOrange/
You can download the .apj from here and use custom firmware button on Mission planner to flash it. As @MadRC mentioned, Mission planner should select right firmware for you. But if you want to be sure, you can use this process.
let us do one thing sir and try send me your param file and ill write it on my pixhawk cube orange and try.
If you can send me the parameter file on my mail eaayash@gmail.com it will be very helpful and appreciated.
Hey @eaayash
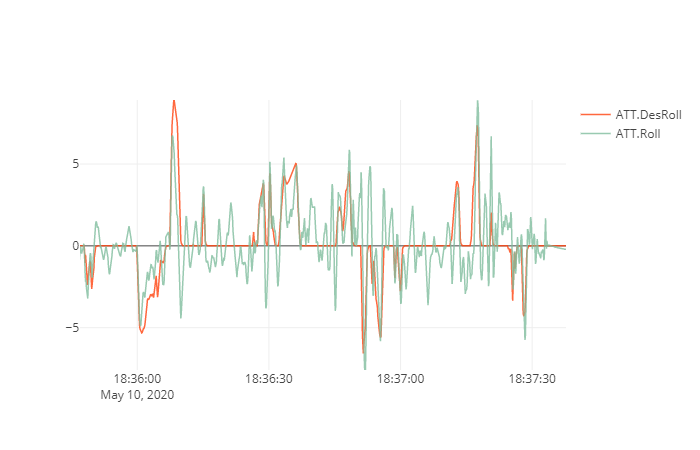
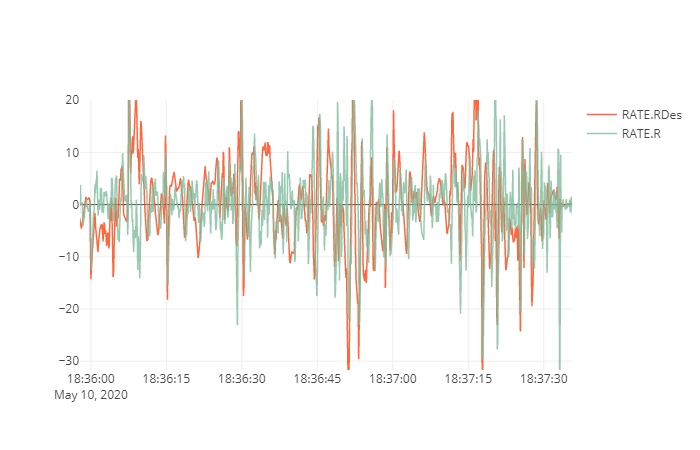
I looked at the logs. I don’t see any problem with GPS.
But it looks like copter isn’t holding attitude as expected because of gains. How did you tune the aircraft? Did you follow the tuning instruction? Share some pictures and info on setup.
i am using a quad with hover1 frame tmotors 380kv motors with 15inch props pixhawk orange cube firmware 4.0.3.
i have a question on tuning which is if i dont have GPS will the copter go on autotune?