So recently i built a big drone having 30 inch propeller and MTOW is 18 kg and i was initially testing it for flight endurance and hovering manually as well as in Loiter mode and was working fine, I thought it is the time to move further and put it in auto mode and with some wobbling completed a mission which was good, Next day i tried to perform one more mission and in this case it was wobbling like hell and there were lot of error some i can recall are EKF variance, GPS error and compass issue.
So i Initiated RTL and drone was moving towards home location then all of a sudden it was falling from the sky and crashed.
I have attached the log file for the same let me know what has gone wrong and how can i correct.
Also i was having Lightware LW20C lidar which was also not working above 3 metres and this testing i have done in the evening so there was not much light, Let me know whether Rangefinder lidar do not work in Night or there is some other issue.
I am using cube kore as as PDB which i have recently purchased and don’ think there is any power issue.
Kindly help me figure out what is the issue so that it should not happened in next testing.
Is that “cube core” has enough power for such big multirotor? How far is compass from bateries and escs ? Please provide some more photos of your setup and info about motors, esc etc. The crush was sudden or it stated go crazy before…?
First of all the FC doesnt go off in the air or reset, because you have data even from the drounce bouncing on the flor.
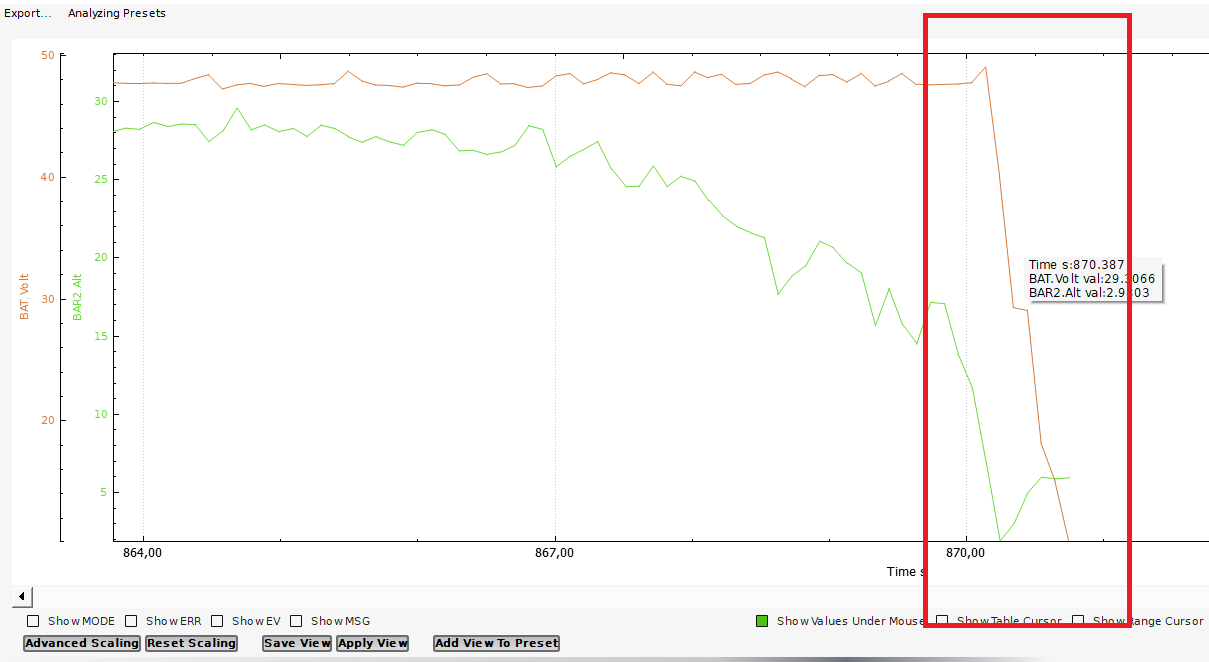
Second is when the motors goes off in the air we espect to see in the moment the motors goes off a increase of voltage, and that is the stange here, I think the motors keep working, but with less power.
There is something very odd on the log with the voltage. As you can see in the next picture, in one second you have 50V and suddenly your voltage went down very fast, and finishing at 10V on the floor.
It seems to be maybe you are using 2 batteries and one of them went out, and im not sure, and the other bettery couldnt hold the drone.
Are you usgin 2 batteries?
One last thing could be your volatage metter on the drone was bad calibrated and there wasnt 50V…
Yes the cube kore has enough power to support this big multi rotor that is why we have chosen kore.
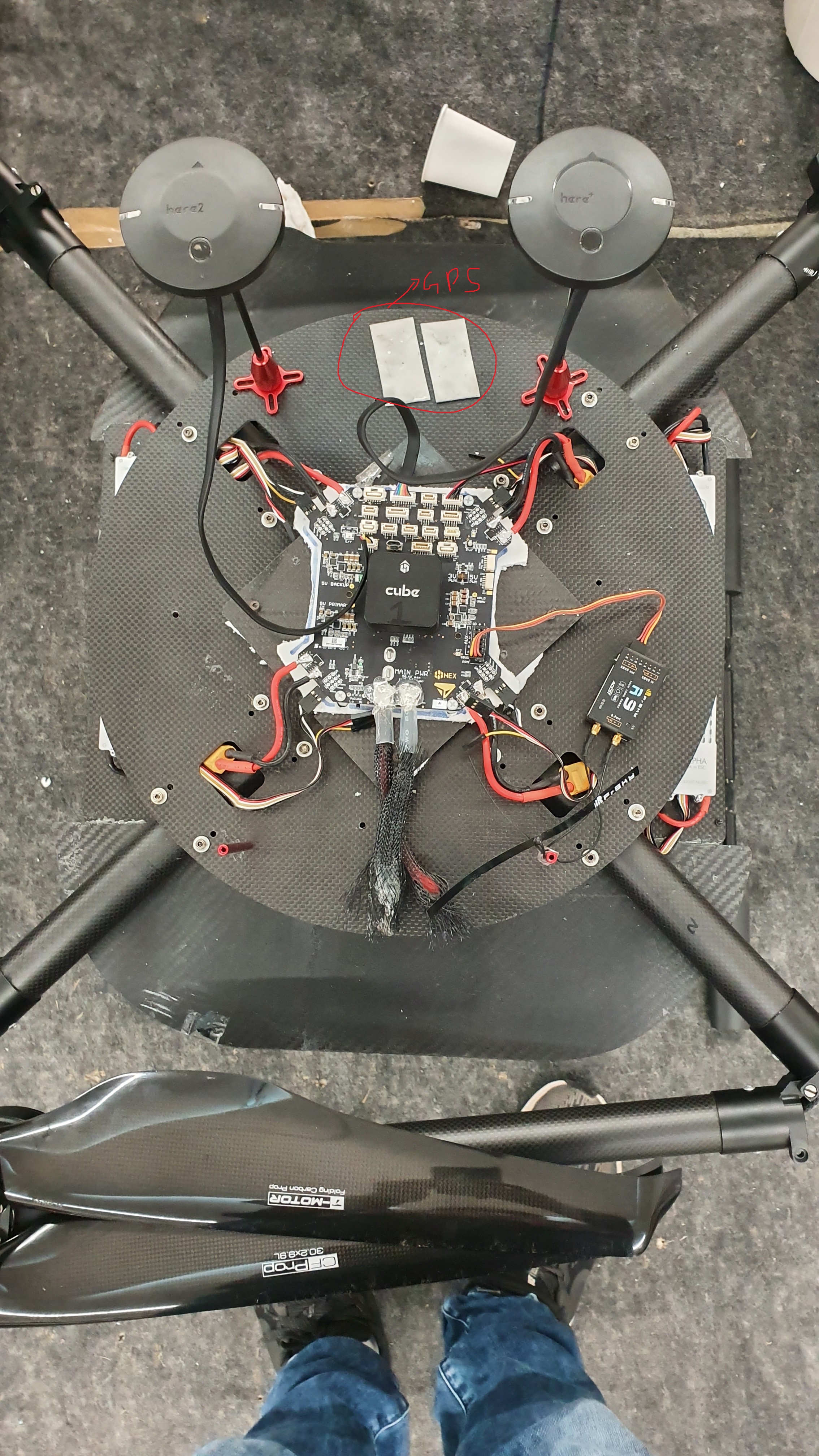
Compass and batteries were very far i mean there is a carbon fiber plate in between them as you can check in images.( Earlier the compass was mounted directly on the plate when crashed happened, later we put gps plate.)
Also the gps was mounted on the plate not on stand as you can see on the images and i have circled the position where gps is mounted.
Also we were using tmotor u10 ii 100kv motor with t motor 30 inch propeller and i think they are balanced as these are coming from tmotor.
The crash was no sudden and it was wobbling in auto mode a couple of times so i decided to give rtl.
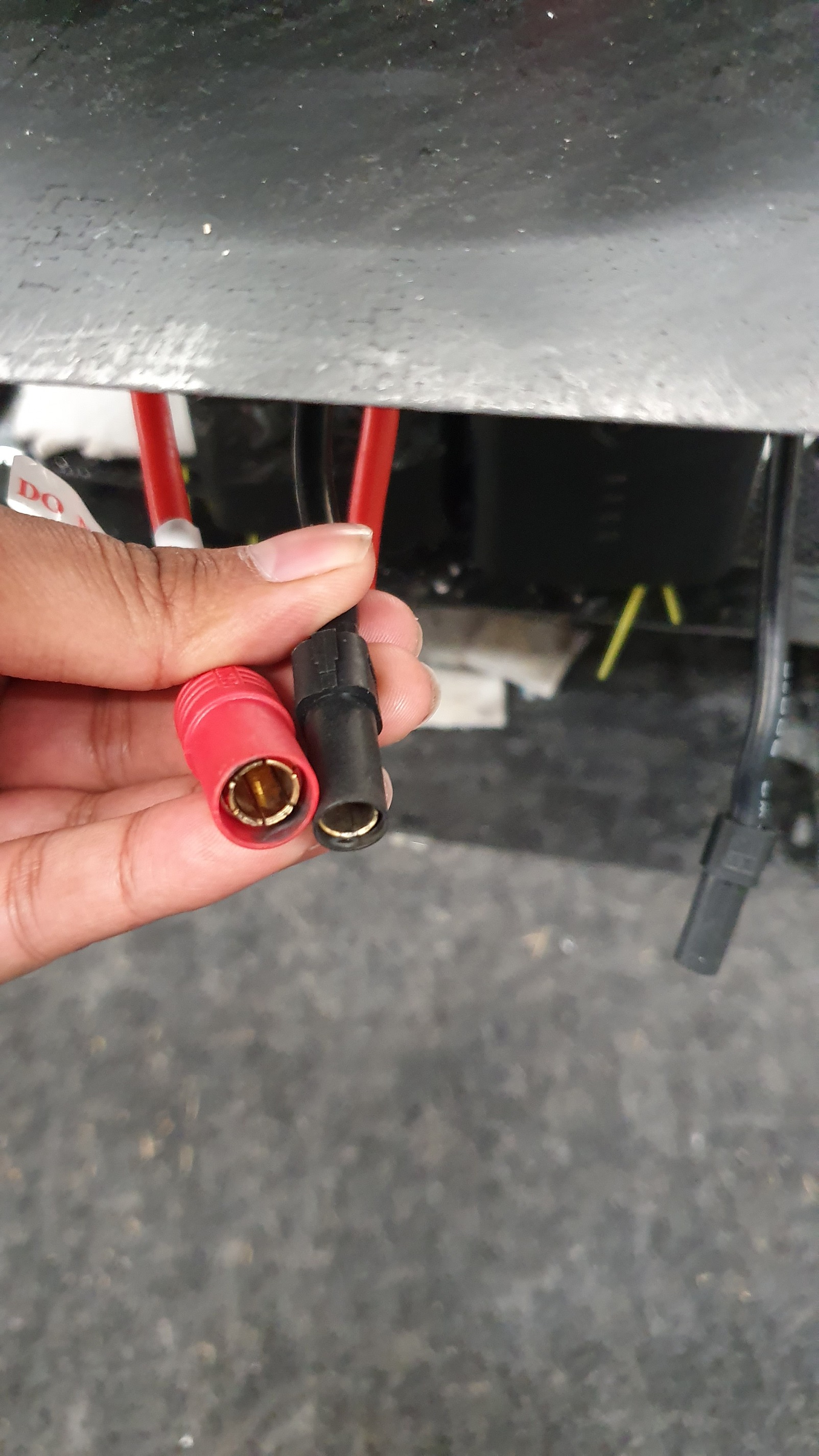
yes we were using two batteries and chances of getting disconnected in air is none because we were using AS 150 connectors which are rock solid and can’t snapped of easily.
Also i have calibrated the voltage using kore default parameter list so the voltage and current sensor wee working fine.
what batteries did you use? Did you measure the voltage battery after the crash? Did you set your PIDs?
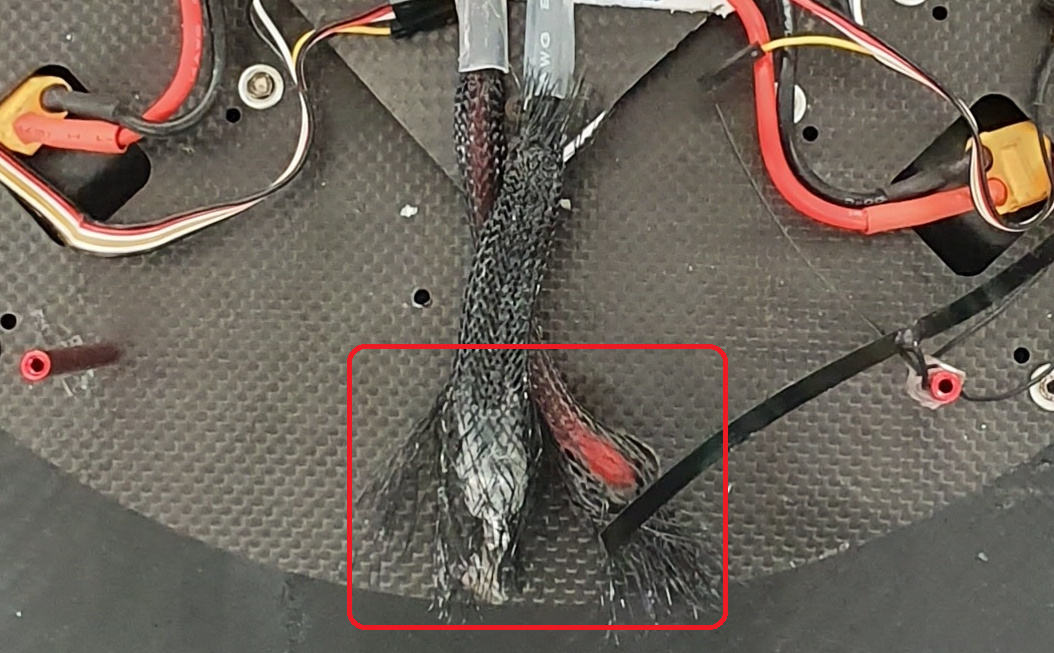
This cables seems to be touching the carbon fiber, and if you carbon fiber boders of those holes are sharp, can cut the silicon cover and can make a shortcut. Did you check those cables?
Beside the awwwwwwwwwwfull ESC power cable solderign, seems to be everything ok. I would check all the power soldering, including the TX150, because if the ESC soldering are like the pictures, may be you can have another soldering bad.
Did you check the kore is tight to the frame? is the frame tight? The telemetry is very clear and you have something lose. Maybe one of the folding part prop is lose. Do you have a no foldable prop to try?
We are using Tattu 22000 mAh 6s batteries in series and the cable is good no issue it is just silicon covering which got loose and that’s why in image it is showing messed up but the wires are intact and also they are having transparent heatshink over them so they are not having any contact with the carbon fiber plate.
I have not changed any PID’s and are using default PID’s
We don’t have any straight prop’s but will try with different prop and will let u know.
Also the lidar in night not pitch black is having just 3 m of range. If you have any idea about that let me know.
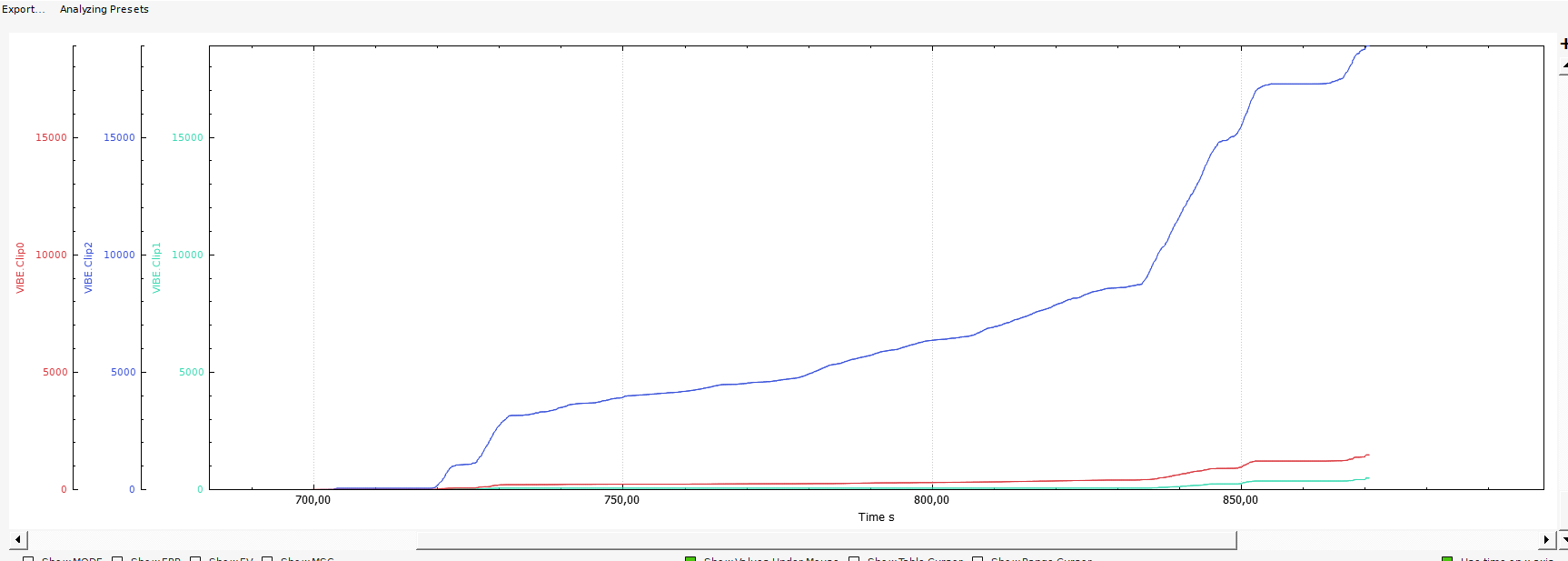
but telemetry is very clear, voltage went down sudenly at the point motors doesnt have enought power to keep the motors running. And the vibrations problems are very clear.
Modern ESCs recover from desynchs by cutting power, counting zero-crossings and reapplying power at the measured timing. Everytime you see current briefly going down, then up then back to medium consumption, you’ve had a desync event.
Pitch and roll wobble constantly if your PIDs are not perfect, but unless you command a yaw change, looking at yaw will show the effect of the desync pretty spot-on.
Now, the Alpha ESCs have a programming interface to load the firmware appropriate to your motor. If you didn’t load the U10-100kV firmware, there’s an inch of hope at the horizon. Get the tool and burn the bytes. You can also experiment with smaller props and payload. A properly designed quad should hover with all motors in the 1450-1550 PWM range.
However, if your ESCs are already programmed, it doesn’t look flyable. Yeah, you can loiter and slowly buzz around, but any real-world scenario with autopilot commands and windy conditions will lead to a crash.
[LE]: Do look at the battery connections, but that voltage drop was after the drone hit the ground
Hi,
Yes aware of that bro and they are already having the U10 II firmware because both of them were shipped simultaneously so manufacturer has upload the firmware for this motor.
I am not sure by the current is dropping because the battery were connected and chances of getting disconnected any battery in air is not possible. Also i will tune the PID again and will let you know.
By the time if you find anything else suspicious please let us know.