Hi,
We have to build a quad last year and tested it in auto mode which resulted in crashing last year, uploaded the logs and till date, there was no confirmed reason for the crash.
Now again I was trying to fly the same quad after again putting it in one piece.
As I have already seen and read a few posts regarding large drone crashes in auto-tuning, Thought to do manual tuning.
While doing that and testing it with default PID values and giving more than 50% roll it started oscillating too and fro and somehow I controlled it and landed it, Again when I take off in stabilise mode again started oscillating on moving roll stick quickly. It flies well and even hovers well in loiter mode but once it gets roll or pitch quickly it starts to move like a pendulum and no mode switching or giving throttle works, seems like it does not take input in that scenario and crashes.
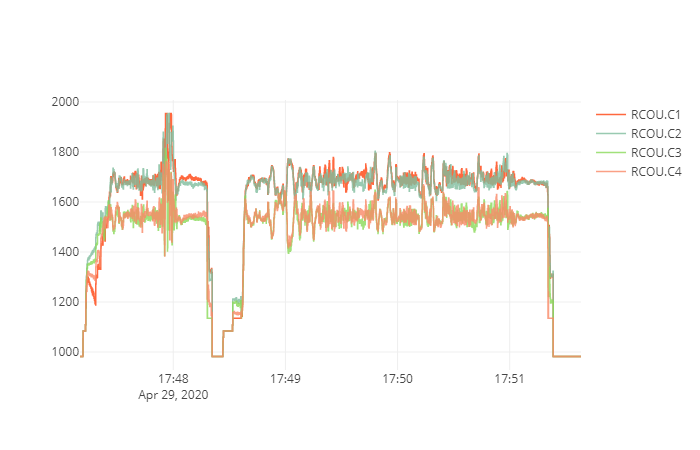
attached the logs kindly look into it.
Here is the drive link - https://drive.google.com/open?id=18ZpZbvHLN2Jo7HzI9z-AjoY--iJwbNSp