I think you are on to something when you said:
I have only a small bit of experience with the HereLink, but we have noticed an interference issue when on the same platform as a futaba RX.
To provide a bit of context, we wanted to use the HereLink on an existing kit-build platform that was using futaba RX for manual control and RFD868 for telemetry (we are UK-based). Our initial step plan was to keep the control and telemetry the same and only use the HereLink for payload (gimbal + camera) control - to test the video link and sbus signals.
However, on ground-based range testing we notice the Fubata system go failsafe (in low power mode) less than 30 m away. This was also accompanied with the LED on the Fubata RX showing red occasionally - indicating a brief period of interference/no signal reception. Therefore, to avoid risk of interference, we bit the bullet and transferred everything to HereLink and performed as much ground-based testing as possible to build up commication link confidence before flying.
Evidence
This theory of the engine cutter triggering seems to be backed up in the log files (from what I can piece together based on the timestamps):
- The spike in the throttle output suggests a loss of thrust (noted by @Alvin)
- The drop in current (and recovery of voltage) suggests something stopped working and no continuous short (also noted by @Alvin)
- The fact that the system stayed alive post crash suggests no major electrical failures (shorts, etc.)
Suggestions / Questions
My suggestion is to ground-test your HereLink and Futaba-controlled engine cutter to check for interference (look out for a red LED on the RX module). Try to keep the antennas in the same posisiton relative to each other for this test as they were in flight. Also check what the F/S settings of the Futaba were (and therefore if a F/S would cut the motors).
In the picture you supplied, it appears there are no antennas plugged into the HereLink (I understand this might be due to post crash conditions):
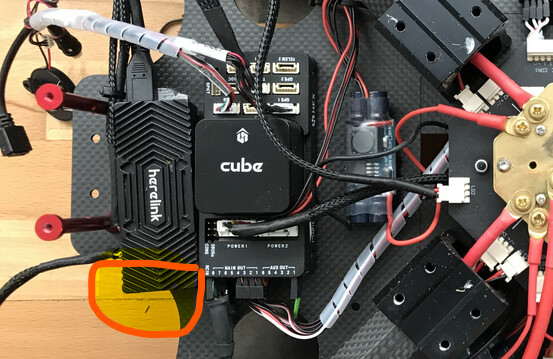
But it does make me question how your command and control links were set up, i.e. why HereLink and RFD900?
I hope this is of some help and might lead to a conclusion of the cause. ![]()
(Just seen that this relates to this project Sharing experiences on HEAVY QUAD 12s 32”. I hope you can rebuild and get going again soon ![]() )
)