Height change 6-8 meters when flying . what can I do for 1-2 meters altitude accuracy ?
Pixhawk 2.1 . Quadcopter .
Height change 6-8 meters when flying . what can I do for 1-2 meters altitude accuracy ?
Pixhawk 2.1 . Quadcopter .
I need a log. Without one, I can only speculate.
My first ideea is that the mission was flown with heading-hold, and there’s a particularity about your frame regarding airflow and hence pressure around the FC, making them different in forward vs. backward flying.
So there’s improvement. Now - I’m still without a log, so can only speculate - load any 4.0 firmware and do a FFT analysis hover. Your AccZ and VibeZ also affect your FCs altitude estimations.
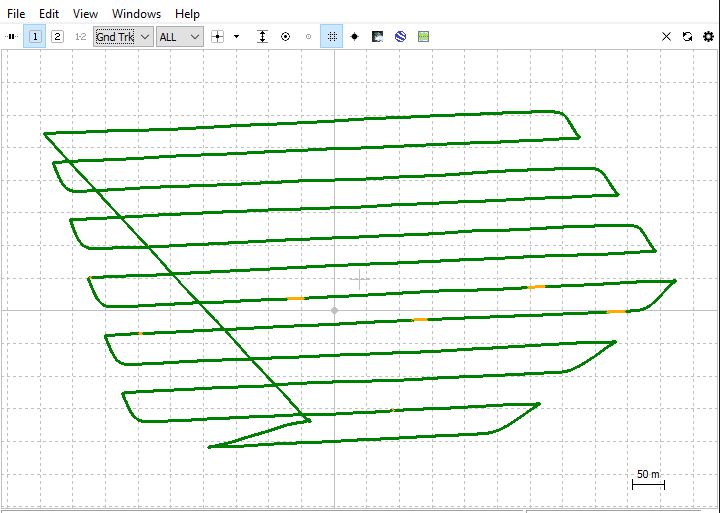
Very fast looking at the log. For the entire flight, your CCW motors are pushed way harder then the CW ones. There’s a motor+prop misalignment that’s pushing your frame in CCW direction.
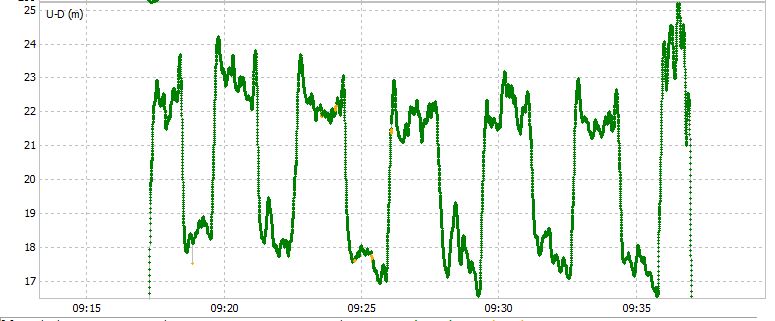
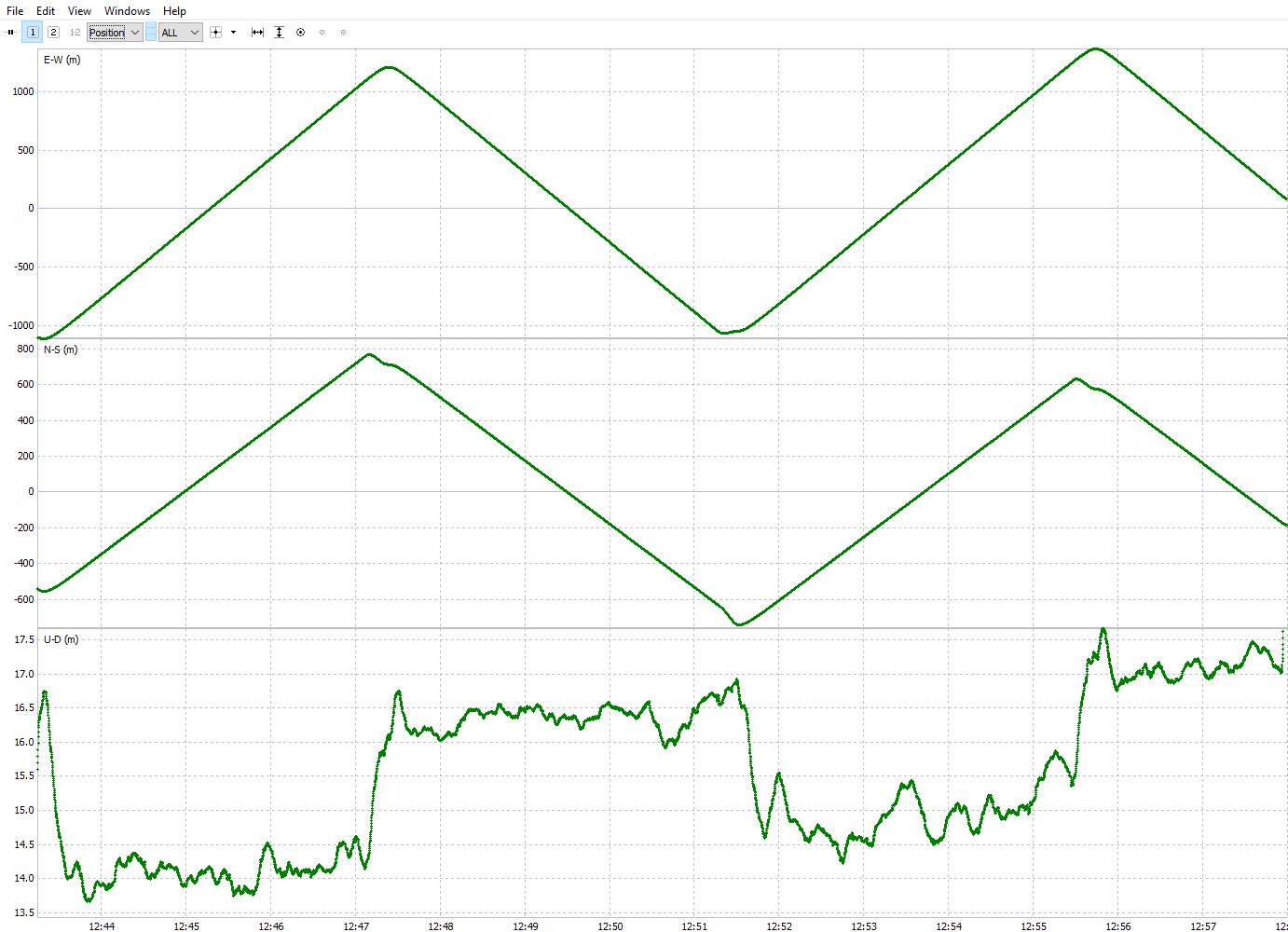
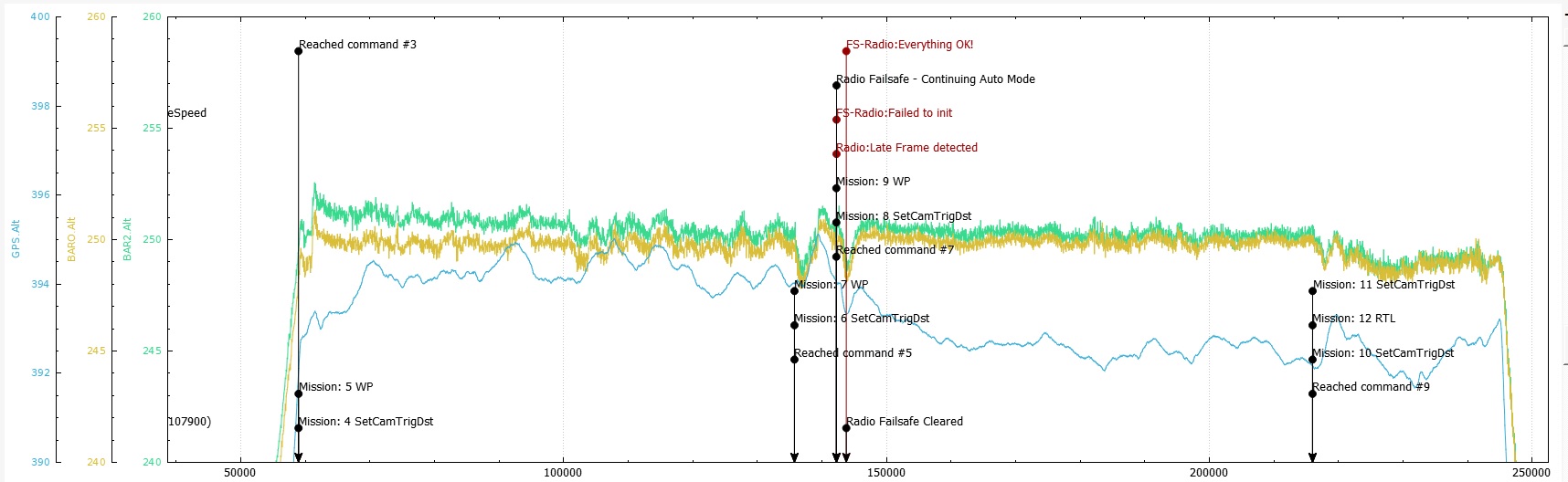
Then, looking at barometer reporting vs GPS altitude, I see that forward flight versus backward flight discrepancy:
Also, your VibeZ, while being acceptable, it spikes at times, even leading to a pair of clipping events.
I’d address the motor imbalance first, then, like I said above, do a short FFT hover and vibration analysis for a notch filter.