An Update for these instructions - this is for updating the firmware part only
- Make sure you have Mission Planner 1.3.64, and the Here2 plugged into port labeled CAN2
- Connect in Mission Planner as normal via USB to the cube
- Goto Intital Setup
- Optional Hardware
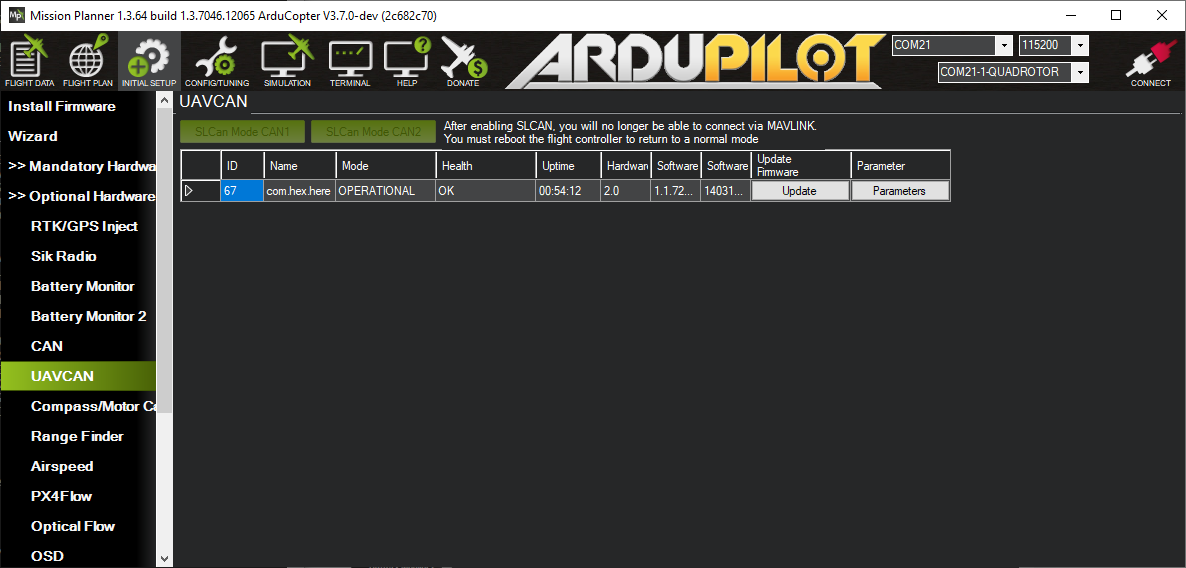
- UAVCAN
- Click SLCAN Mode CAN1 (this is labeled as Can2 on the carrier board)
- a device should appear in the list, click update
- Mission Planner will download and install the latest CAN firmware for you.
- once updated switch to any other screen
- connect as normal in Mission planner again and config the parameters as listed above