Hello, I am new to the group, first to thank all the members and especially the professionals who dedicate part of their time to solve problems, I hope to collaborate at some point with my experiences.
I have a cube 2 black underway with here2, I have flown once with it and had a small GPS loss problem without major consequences, I had it in I2C, I started reading and I concluded that I should put it in CAN mode, I did this, I confirmed everything with your instructions, I have updated the firmware without problems, the LEDs work perfectly, everything is fine except the error it gives me with the prearm.
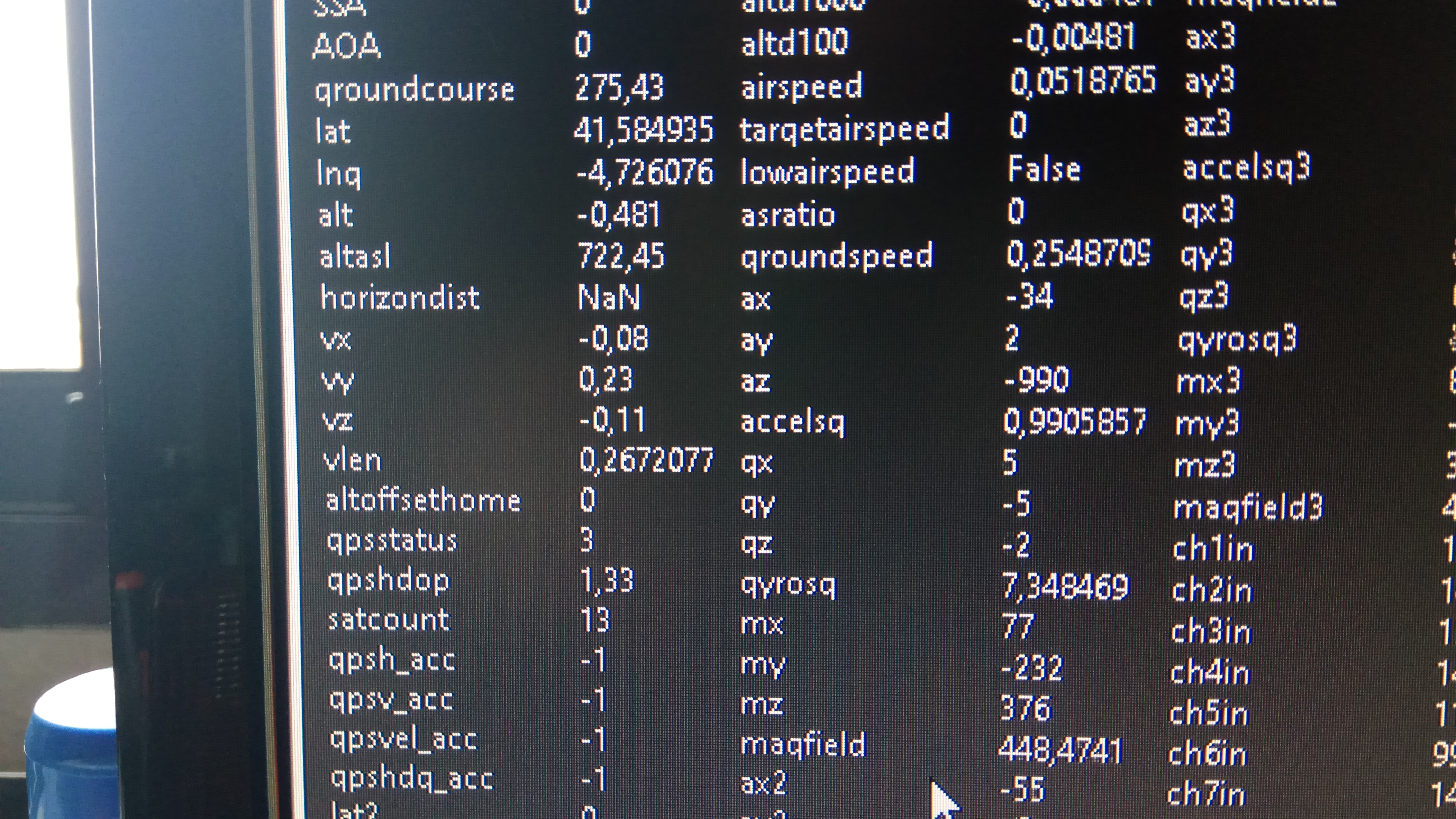
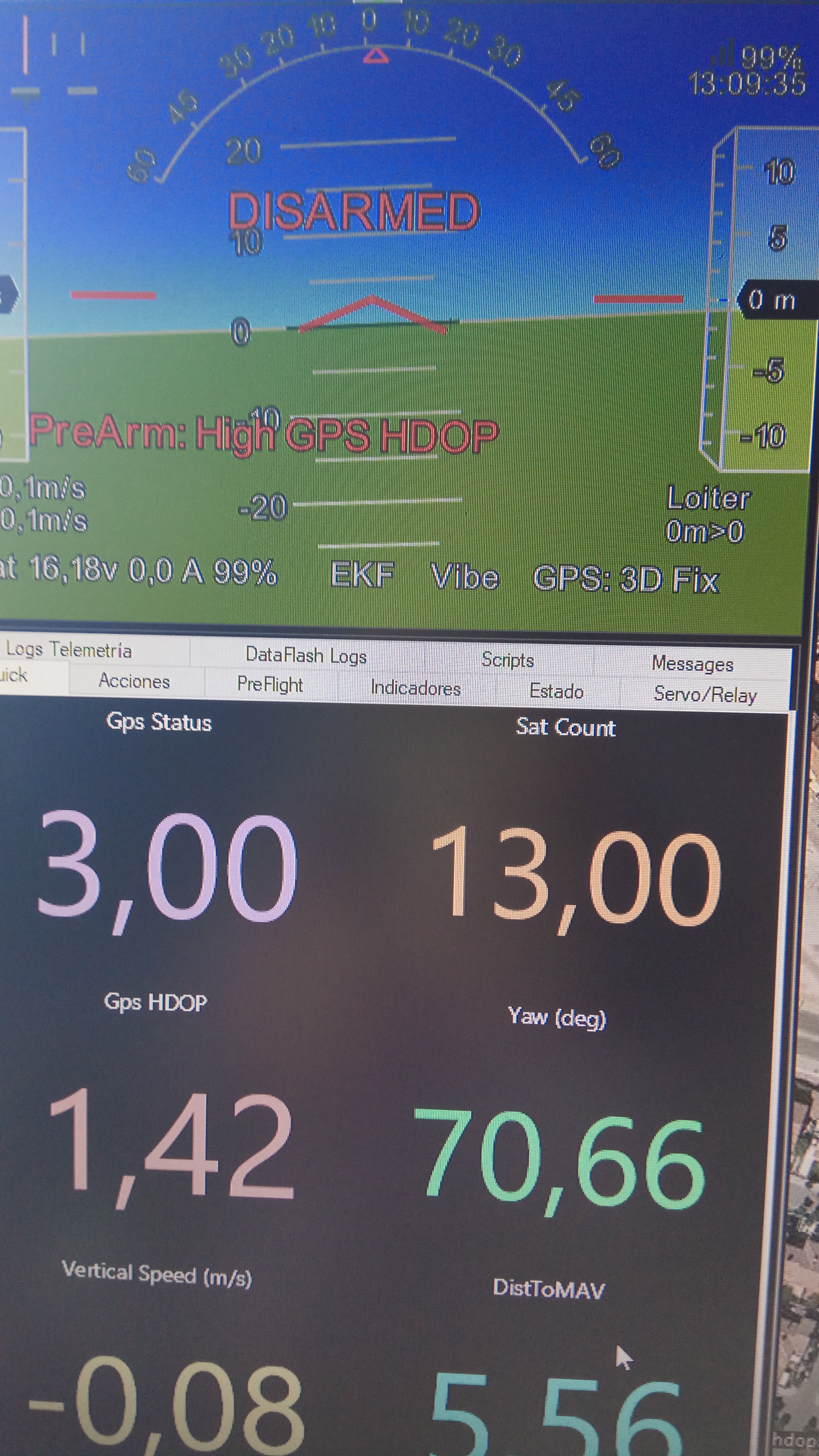
Constantly “Prearm High GPS HDOP” appears, the HDOP is usually between 1.3 and 1.8. Could you help me to know what happens?
thanks
Hi, thanks for answering Mallikarjum,
At the moment I could not go out for climatology with the new CAN configuration.
If I did it in I2C GPS mode, with i2c in the same interior place that I was giving me values below 1,
I also have another device with Pixhawk 248 with gps m8n, in the same interior place, right now, also 12sat HDOP 0.80. green led I can arm without problem
I have tried again the cube black with GPS mode CAN with 12 sat and hdop 1.65 skips the arming message, prearm high GPSD HDOP.
then I have gone to 14sat and hdop 1.33 green led I can arm, I arm everything ok I follow HDOP in 1.36, I disassemble and turn the LED to yellow beeps and I can’t arm.
It gives me a lot of distrust to fly this message, I read here that HDOP was not so important, but I have doubts why it does not fall below 1 as before as other pixhawk?
what do you think? Thank you
Gps system is not designed to work indoors correctly. You should be happy that the system is telling you it’s bad when indoors because it is bad signals are bouncing of the walls and giving you bad data
I already know it, the doubts come because I have another 2.4.8 simple pixhawk drone with basic M8N GPS, and it doesn’t give me those problems in the same interior place at the same time, the HDOP is 0.8.
On the other hand, comment that with many doubts and fear, today I flew the Cube drone with Here2, I had no problems but the HDOP was not lower than 1.
I still don’t know if the HDOP parameter with Here2 in CAN mode is really important, I have read somewhere that it was not.
can any of you confirm it?
Thanks,
The one you should have doubts about its the one that is not filtered correctly so it’s not blocked the bad signals indoors. And allowing a false reading of 0.8hdop indoors
Ok, understood, thanks Kurt.
As for the second comment, is there any difference in interpretation of the gpshdoc precision parameter when the gps is in this uavcan mode?
Is the report given in mission planner perfectly valid?
Do you have to consider something else to know the accuracy of our GPS?
thanks greetings