Folks, I’m on 4.0.4 and using HERE2 on CAN. Everything (Accel/Compass/Radio) has been recalibrated since updating to 4.0.4.
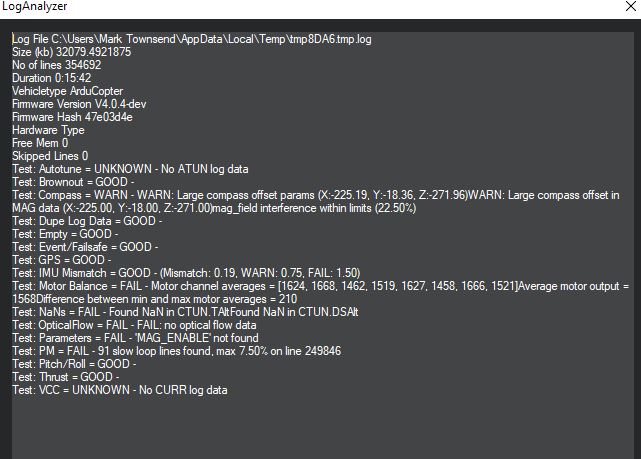
Internal compasses are disabled and the HERE2 is up high on a mast. Yet, I’m getting large offsets. The machine flies great though.
Also, I’m still getting a motor balance FAIL. I’ve been working on my tune for a week or so now and it’s rock solid in the air. The CofG is perfect in all directions and these arms aren’t adjustable anyway.
Can someone review the logs more indepth for me as I’m not well versed in reading them on a granular level.
I performed two @15min flights this morning.
Logs/params are here:
https://drive.google.com/open?id=1GaRU-y3CNGQ6z1SyBebmRWaf4j_qjaxa