The HereFlow is a CAN device, right? If it is detected when you set it up but not after a reboot, that sounds like an ArduPilot bug. Probably something to do with how the device drivers detect and enumerate the devices. The CAN interface is pretty new so there are probably still some bugs.
Maybe try posting this on the ArduCopter forum, or open an issue in the github repo.
I encoutered the same issue.
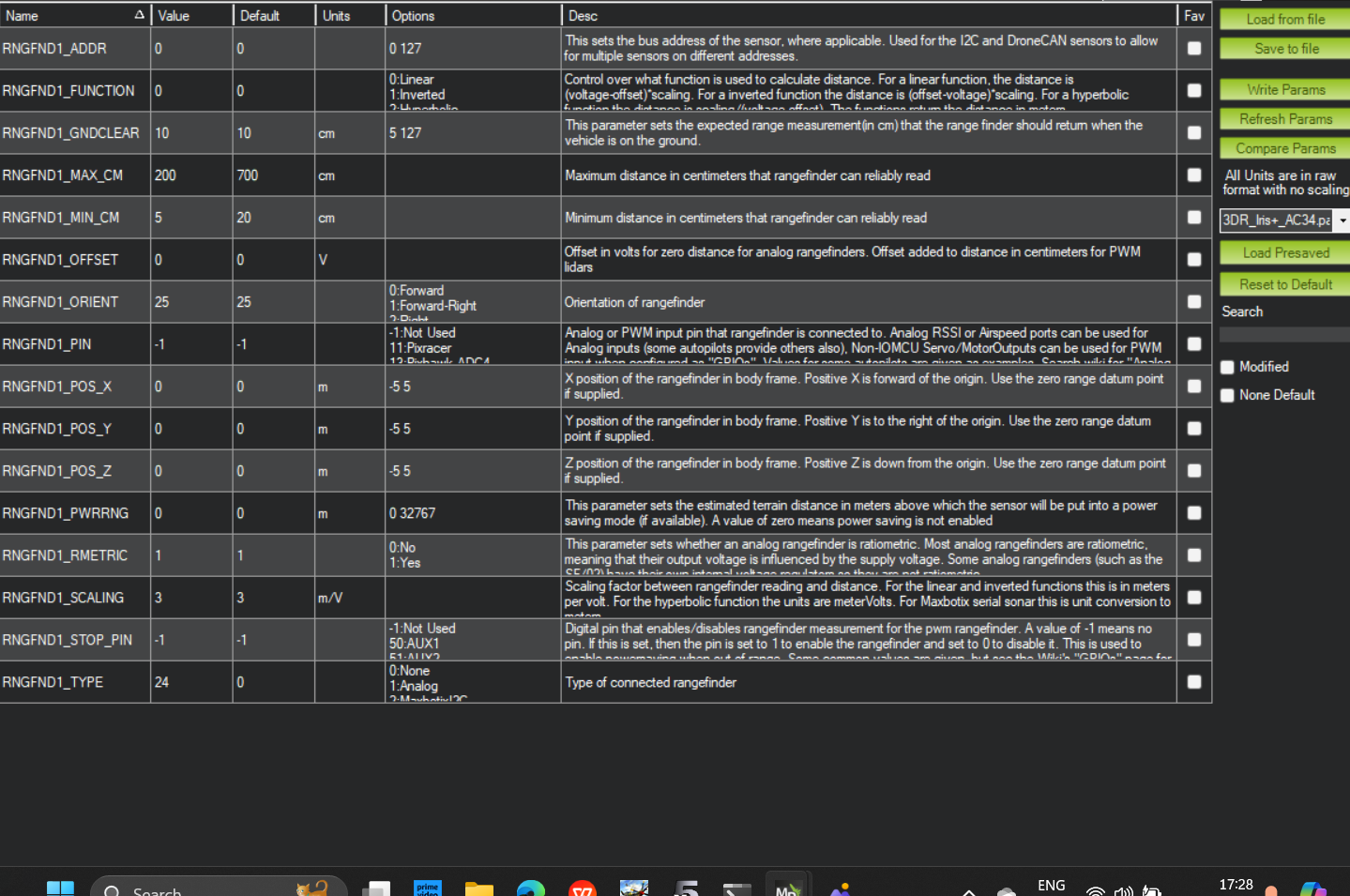
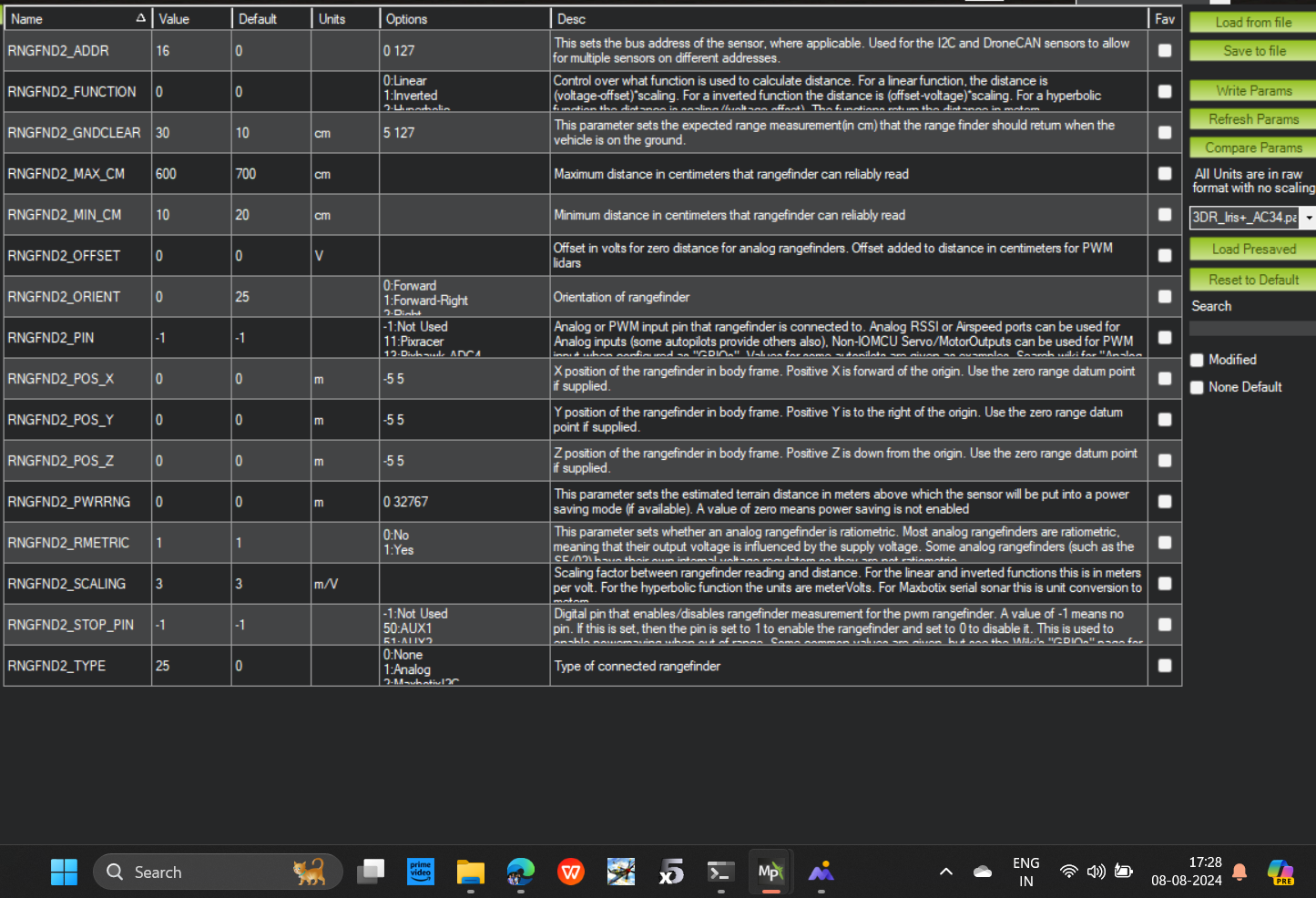
I have 2 tf-mini ( serial ) working ok. As soon as I activate the UAVCAN hereflow lidar ( rangefinder3 here ) , booth rangefinder1 & 2 ( tf-mini ) stopped working.
If I disable the rangefinder3, tf-mini get back to operationnal.
More information on this issue. Enabling hereflow rangefinder after booting with it disabled , and TF-Mini enabled works. But then on next reboot TF-Mini will not be functional.
To temporary solve this issue, is it possible to enable RNGFND3 ( my Hereflow here, 1 and 2 are serial tfmini ) by using scripting ?
I’d like to boot with RNGFND3_TYPE disabled, wait everything to start , then change the RNGFND3_TYPE to UAVCAN.
This works manually, I’d like to automate this at each startup.
Can this be achieved using lua scripting on Cube black ?
well i have the same issue, i tried both 4.07 and 4.1 but no luck.
since i am using here3 gps, there is no chance disabling the CAN BUS. i have a tf luna module. it wont work with serial and i2c both.
losing the i2c bus is a huge disadvantage. course now i cant connect any of the rangefinder sensors to the cube.
any workarounds for this?
thanks.
hii everyone ,
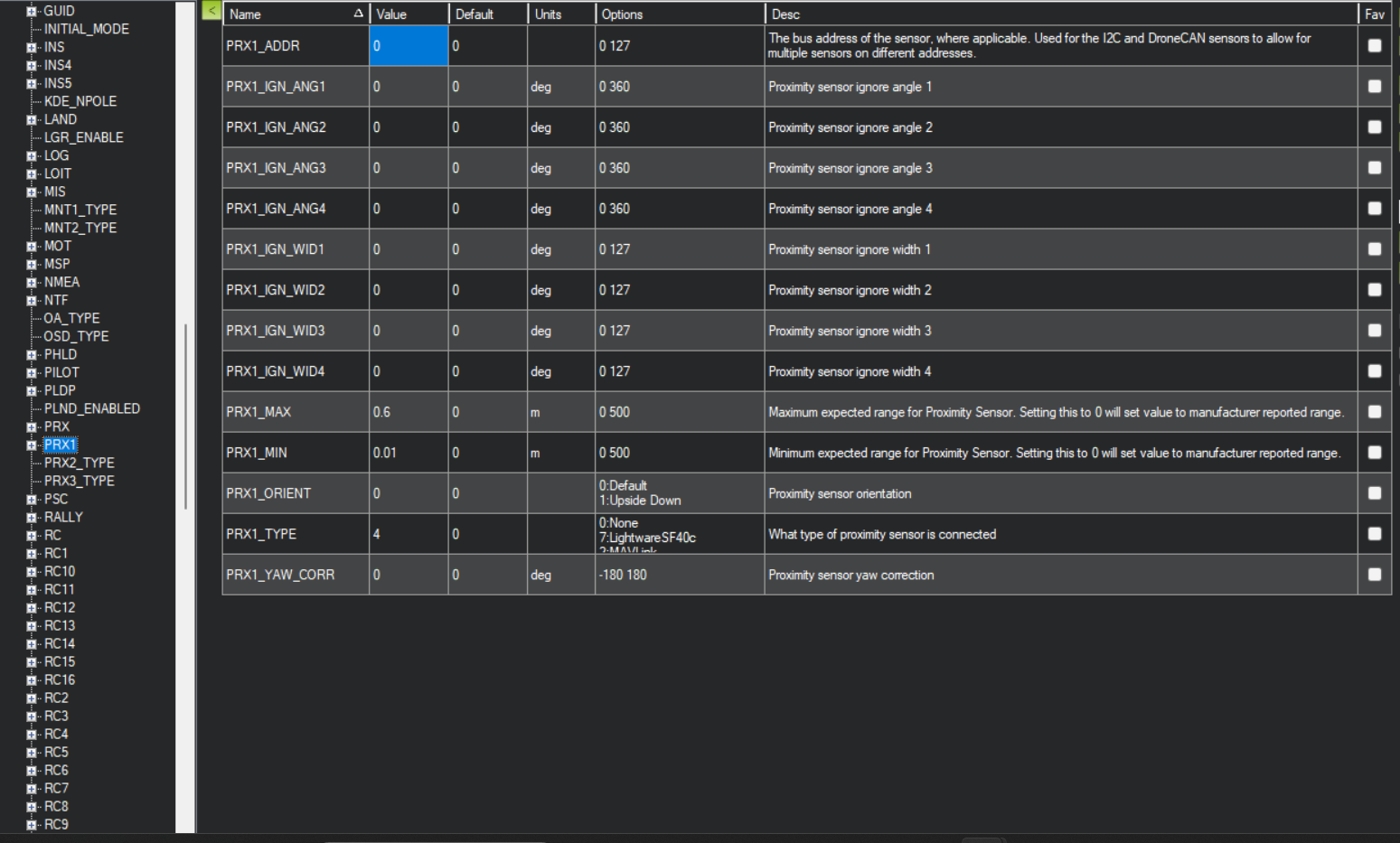
Ia building a copter with cube orange plus running on v4.5.5,mounted on Hexsoon EDU 450 frame with Here 4 Gps ,Iam facing a similar issue with the TF MINI PLUS lidar which is connect to i2c port as RNGFND2_TYPE=25 as front facing lidar and its showing the data in the proximity gui ,but the issue is it’s not avoiding the objects as it’s supposed to do, when I enable PRX1_TYPE=4 the lidar is not giving any data,iam also using hereflow sensor in RNGFND1_ TYPE=24 AND FLOWTYPE=6
Thankyou
Good morning, Gentlemen, I have the same problem as you,
installed TFMini Rangefinder 1 front part and HereFlow Rangefinder 2 lower part both detect data I have not tried in flight yet but! when starting mission planner PreArm:PRX1:No Data appears and does not arm the drone.
possible some help?
Thanks a lot
valter