I’ve just installed a Hereflow using the alpha batch instructions. My version is a Rev.4, I believe the instructions refer to the Rev.3. While testing that everything is working my results are:
sonarrange - reports a value and functions.
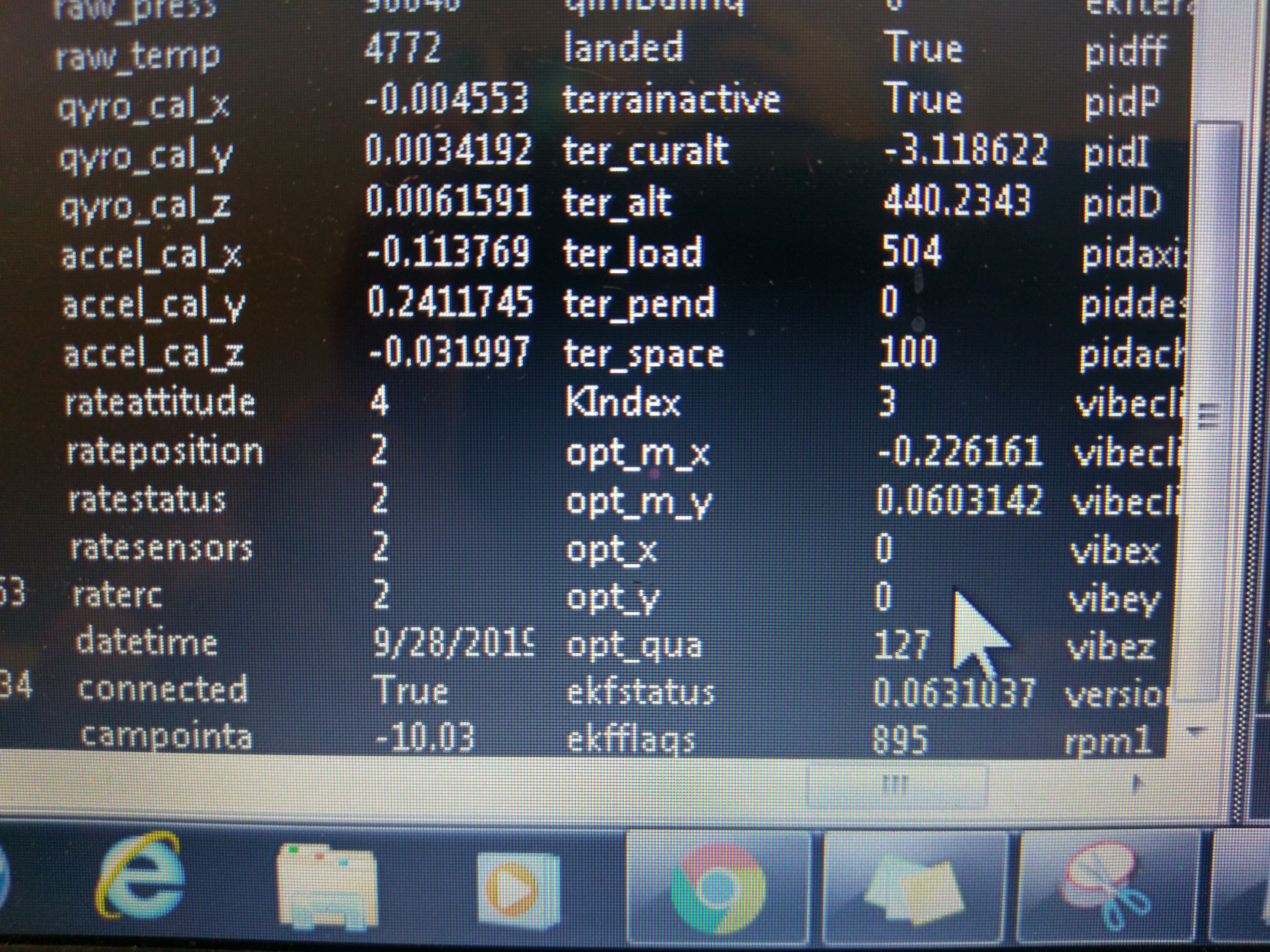
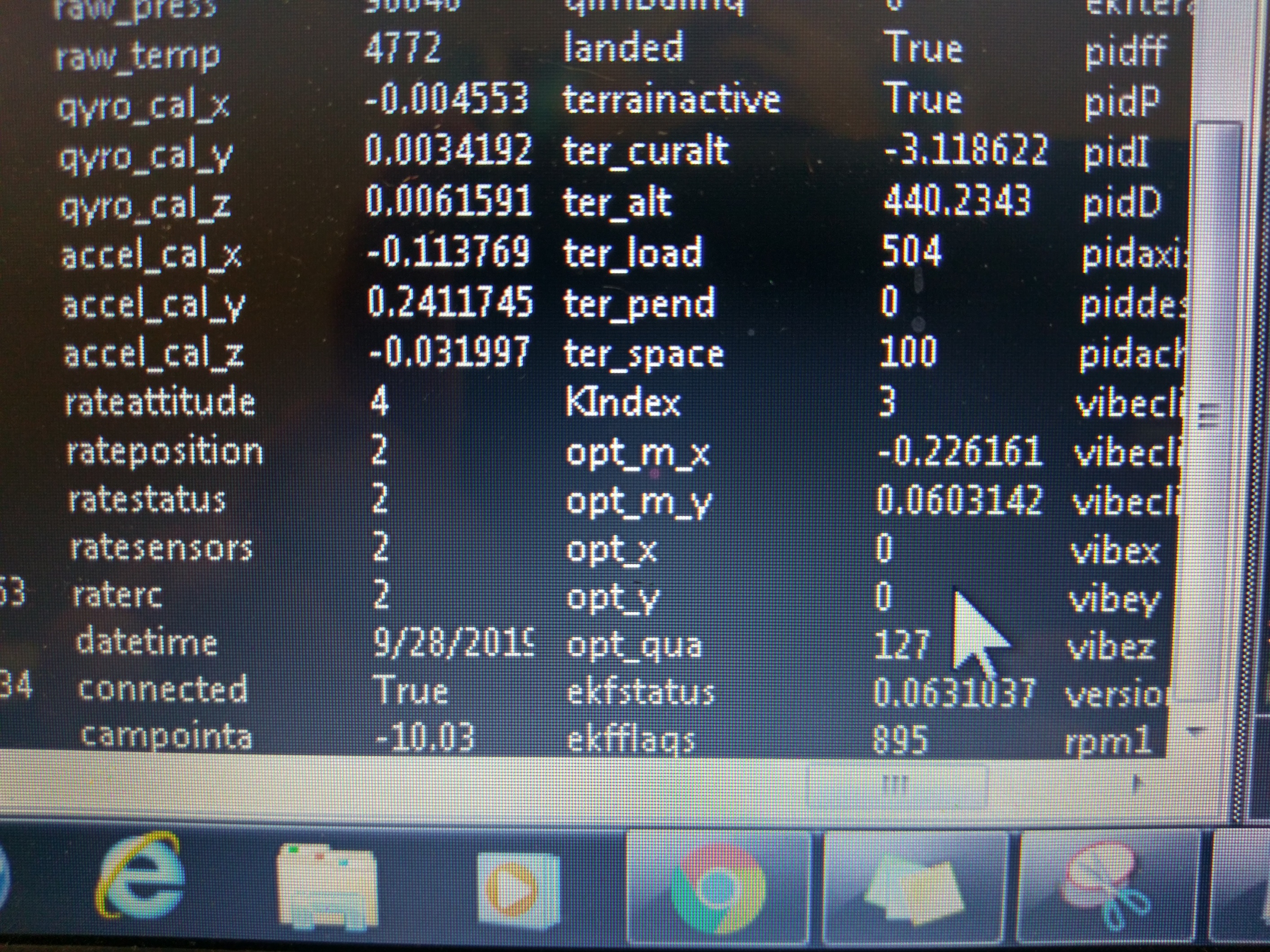
opt_m_x - reports a value and functions.
opt_m_y - reports a value and functions.
My problem is opt_x and opt_y report a value of zero and don’t change when the drone is moved as per the directions say they should. Is this normal or is there a known fix for this issue?

{kind=link}
@jschall? Any ideas?
Here are some logs, they are all over the place as I was playing around with a few things. Optical Flow is Fail. The most recent log was a flight.
https://drive.google.com/drive/folders/1P67oBvy2KNGMvukA4HRWPXM51k1b1aXK?usp=sharing
Philip, have you seen this issue with any other Hereflow V4? Obviously it’s wired up correctly and the parameters are set correctly or I wouldn’t have a response from the sonarrange and opt_m_x / opt_m_y. Is this a correct assumption on my part? I have done a parameters reset and started over to no avail. Do you have any trouble shooting methods up your sleeve?
I haven’t seen any issues as such… still waiting for @jschall to add to the conversation
@philip I believe I may have gotten these two axis working now. Maybe user error. When looking at the readings in MP the other axis have a drastic change in their value with minimal moment of the drone. The opt_x and opt_y both gave me a reading that ranged from -4 to 4. I had to, rather aggressively, swing the drone front to back and left to right but with a sweeping motion, like a hammock. Does this sound correct to you?
The way to swing it is around the flow unit… ie, the flow unit should remain in the axis of Rotation