Herelink RC enters failsafe, the Air Unit receiver holds the last known pilot command values, until it regains contact with the RC and realizes everything is centered, and switched back to Autopilot.
I accidentally didn’t ask the question. I want my quad to continue in a particular flight mode, forget the last known pilot value, and return to automatic autopilot (in that particular flight mode). I think what dictates this is the receiver (air unit) which i do not know how to modify/configure.
I understand that. None of the configurable parameters have the option to allow the copter to forget pilot’s last command, and continue in a chosen flight mode.
In that link you sent me, it demonstrates how to set HOLD or NO PULSES on the receiver. I cannot find anything like that with the Herelink.
The failsafes on Ardupilot simply change flight mode to RTL, Land, etc.
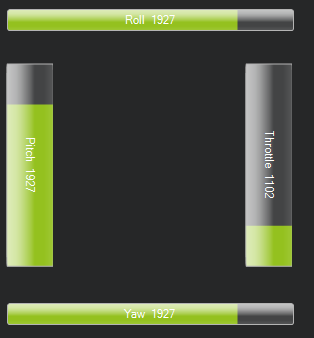
I have just tested with my Herelink with latest firmware. It only holds throttle and rollwheel when it disconnects. The other axes back to centre as long as I turned off the controller.
It is a flesh loaded arducopter. I don’t have any special settings.
You can verify this yourself by connecting everything, go to Mission Planner > Setup > Radio Calibration. Then move your sticks away from centre. Turn off your Herelink controller to simulate connection lost. You will now see what it would do when controller is disconnected.
Are your air unit and controller both in latest firmware?
Can you try again with resetting all parameters to default in autopilot? Try after finishing the RC calibration.
I tried again this morning and not able to make them return to centre in RC calibration page nor Failsafe page.
To verify the RC failsafe for Herelink, you can go to the home page of Mission Planner and look at the HUD. The message “NO RC Receiver” will show up and RC failsafe will be triggered when either air unit or controller is turned off.
They will stop sending pulse to RC so that autopilot will recognize RC is gone.
You can try to arm and spin the motors (without propellers!) then turn off controller or air unit. You should see them stop spinning once the link is broken.