Hi, this is my first build with pixhawk, was always using DJI A3 or NAZA before. Always wanted to try pixhawk as it is open source.
I guess technically it is my second Pixhawk build. I made the very stupid mistake of going straight into setting this up on my 1.5 meter X8. Took the A3 pro off, popped the Kore and cube black in. Got it all setup. First flight did not go so well. After an expensive teaching moment I decided that maybe pixhawk was going to to take a bit more tinkering than an A3 pro and I should put it on something that costs less than one of the props on the X8. Lesson learned.
First off, my thumbs are trained for spring loaded sticks and I have no interest in changing that now. I can’t continue with DJI because:
- they suck for integrating anything that isn’t DJI
- they discontinued all there autopilots and the M600
- I need to be able to lift a payload that’s heavier than a can of beer

So staying with them is a nonstarter.
SO I have started with an F550, motors, props, and esc’s are bone stock, straight out the box. I am using a spektreworks Kore, cube black, and the original Here GPS as well as Herelink for all things control related and a Tattu 4s 10000 mah 25c battery:)
I have gone through the video for calibrating the herelink. I have calibrated from the home screen drag down menu. I have calibrated from MissionPlanner. I have calibrated from QGCS. I have tried center throttle 0 checked and unchecked.
With it checked it arms at my low speed setting and stays at my minimum spin setting. I can bring it to a stable hover in stabilize, loiter, or alt hold. It will only stay in a hover if I continue to give a bit of throttle. When I release throttle it immediately descends (aka crash if I let it).
With center throttle 0 unchecked I have to hold down to arm and when I release it immediately goes to 50% throttle. This actually seems like what it is supposed to do with center throttle 0 unchecked though. I only tried that setting just to see what would happen.
I need it to come to a stable hover when I release the sticks in althold or loiter (from everything I have read those are the 2 settings it should hover in with no command inputs). I need this thing to be as simplistic to fly as possible as I have a payload to deal with and don’t have time to deal with constantly adjusting throttle in flight to stay at a set altitude. That’s fine when I am flying FPV, not for this. Also, my big X8 is freaking expensive and I was just starting to no longer get heart burn everytime it flew with the A3. I would like to minimize the amount of panic attacks I have when I fly that with pixhawk
- mot_hover_learn is set to 2
- pilot_thro_bhv is set to 7
I followed every single step in the herelink setup videos
I followed every single step in the Tuning — Copter documentation
It exhibits really stable flight characteristics for the first flight with no extra tuning. It just won’t hover. Like, I bring it up a couple meters, get my thumb set and it just stays put. Was pretty stoked about that as the X8 did in fact not do that.
I have been through every arducopter and cubepilot conversation I could find about this issue but could not find a fix. I tried just about every idea from those other threads to no avail.
It has to be something glaringly, face palming obvious I just can’t seem to figure it out.
According to the setup and tuning procedure it should be hovering.
Here is the link to all of my logs thus far. The most recent is from 11Apr and is a 5 minute hover. I had to keep the throttle pushed up just a little bit to keep it in a hover. As soon as I let go it descends rapidly. I have test hovered it for about 15 minutes so far.
with just a little bit of pressure on the throttle I can keep it nice and stable in loiter. Alt hold does not actual hold Alt, still needs just a bit of pressure on the throttle. Stabilize works pretty much as advertised.
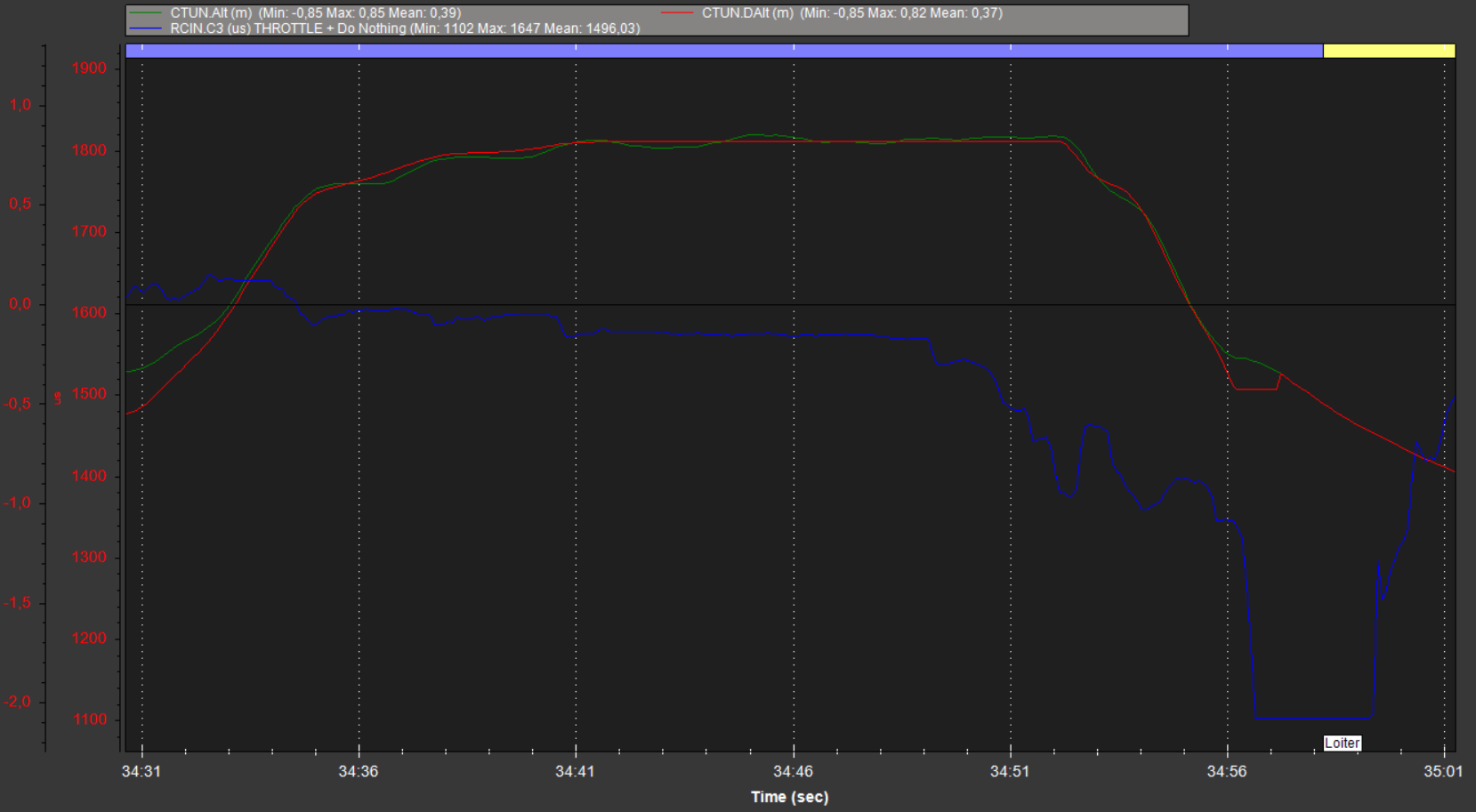
I can see the two Ctun’s have converged and so it should be hovering nicely.
I am uncertain what to try next so any help would be awesome.
Thanks,
Cory