Alvin: Just want to clarify that flasher_win don’t actually give controller unit the latest firmware. It is more like restoring the controller back to factory settings. Controller is being updated after you entered the key.
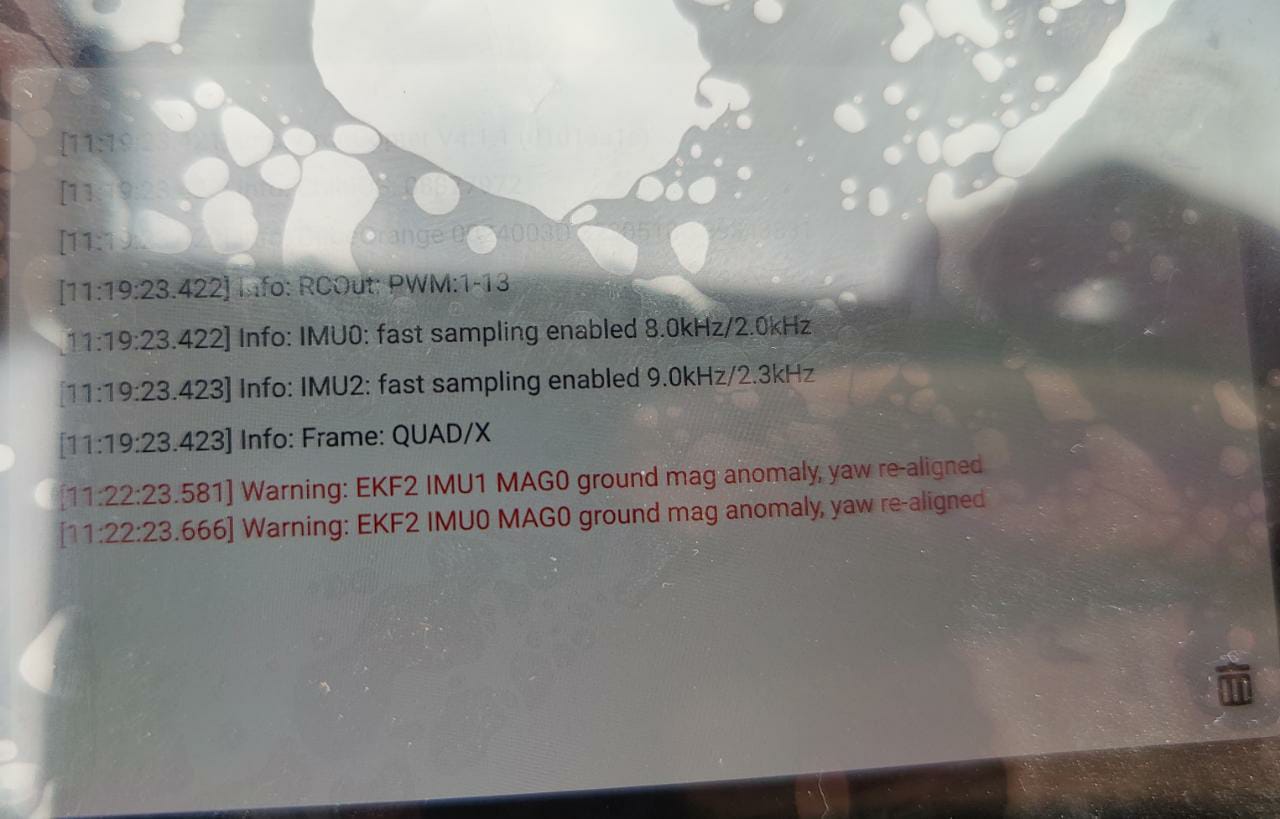
Clearly the console displayed the message “downloading firmware”, but this is the least of it.
Alvin: Try the latest stable. The resolution changed so it is easy to notice the update. Remember to update both air unit and controller.
As I have already mentioned, I have already tried the stable version in cubepilot orange; also in herelink from android (as its documentation indicates) I have updated to the latest version; also to the air unit, also from flasher (as indicated in its documentation), but just in case, from the herelink itself in android, the option to update the air unit appears and I have applied it.
Alvin: Dev firmware tends to contain new/experimental parameters.
It is its own documentation that indicates that the latest version should be used https://docs.cubepilot.org/user-guides/here-2/here-2-can-mode-instruction#allocating-node-id-method
I do not understand that they comment that it cannot be used now or in that case, they should review the documentation and give a solution
Alvin: Verify your serial port baud rate on autopilot. It should be 57600.
Serial port baud inside herelink? Are you sure? In any case, I already fixed that problem and it had nothing to do
I asked other questions, the most important ones, which you have not answered, now I ask it again:
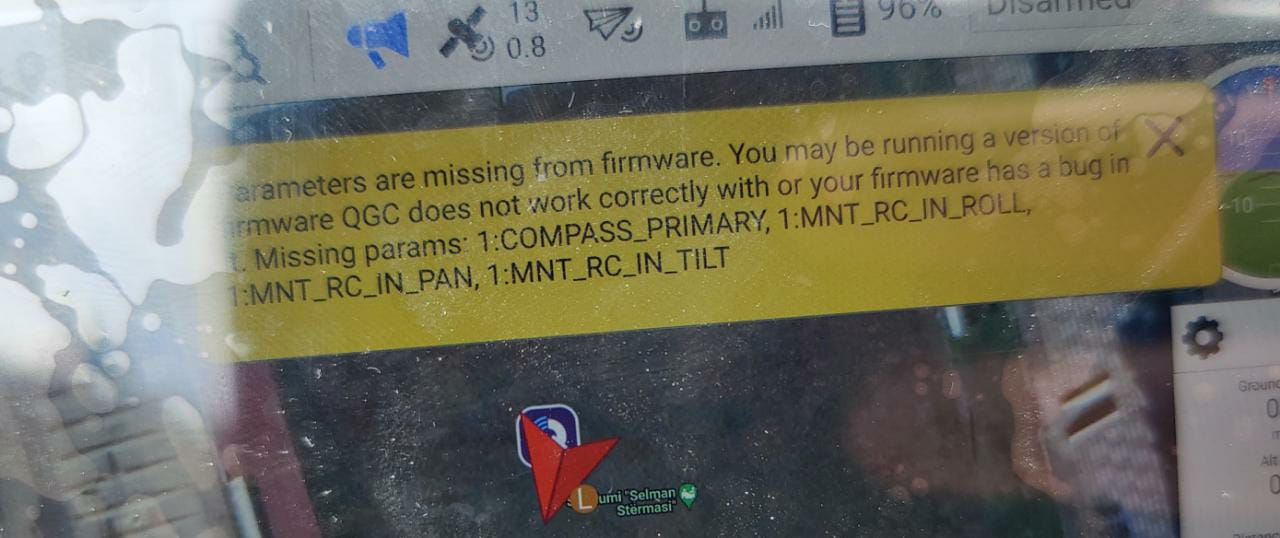
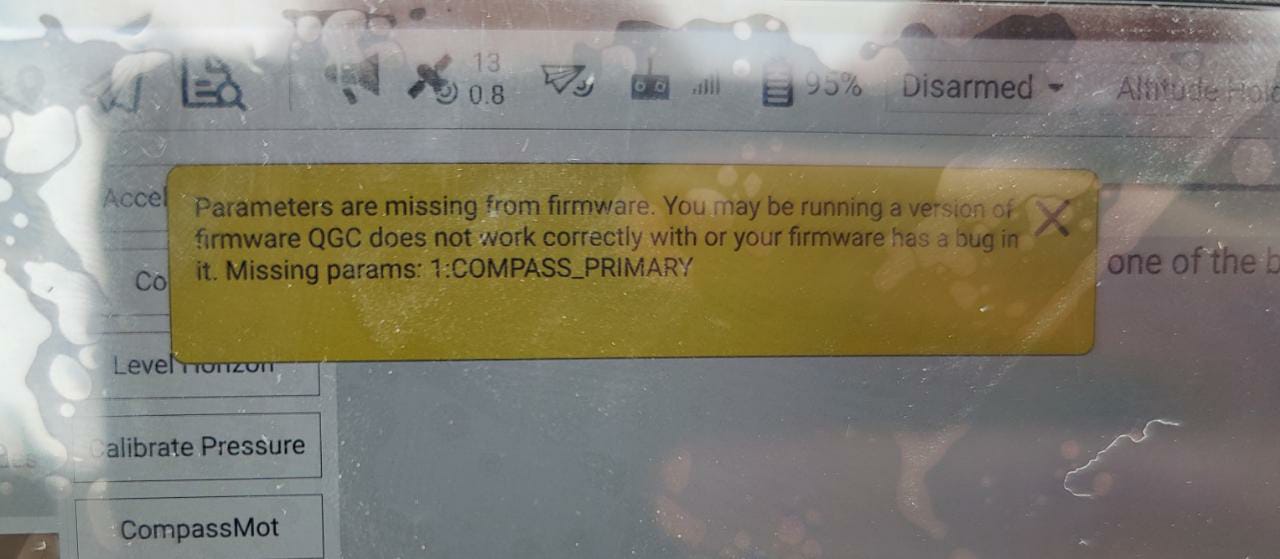
What versions should we have, what steps should we take so that this error does not appear. There are several options:
- The error does not happen, because please tell us what version and compilation number you have in both herelink and ardupilot and what steps you have carried out.
- They have the same problem, then please tell us if it is not a critical error and when they are going to solve it.
Also, and to avoid these mistakes, is it worth using PX4? How bad is using PX4? Years ago Ardupilot was better, is it still that way today?