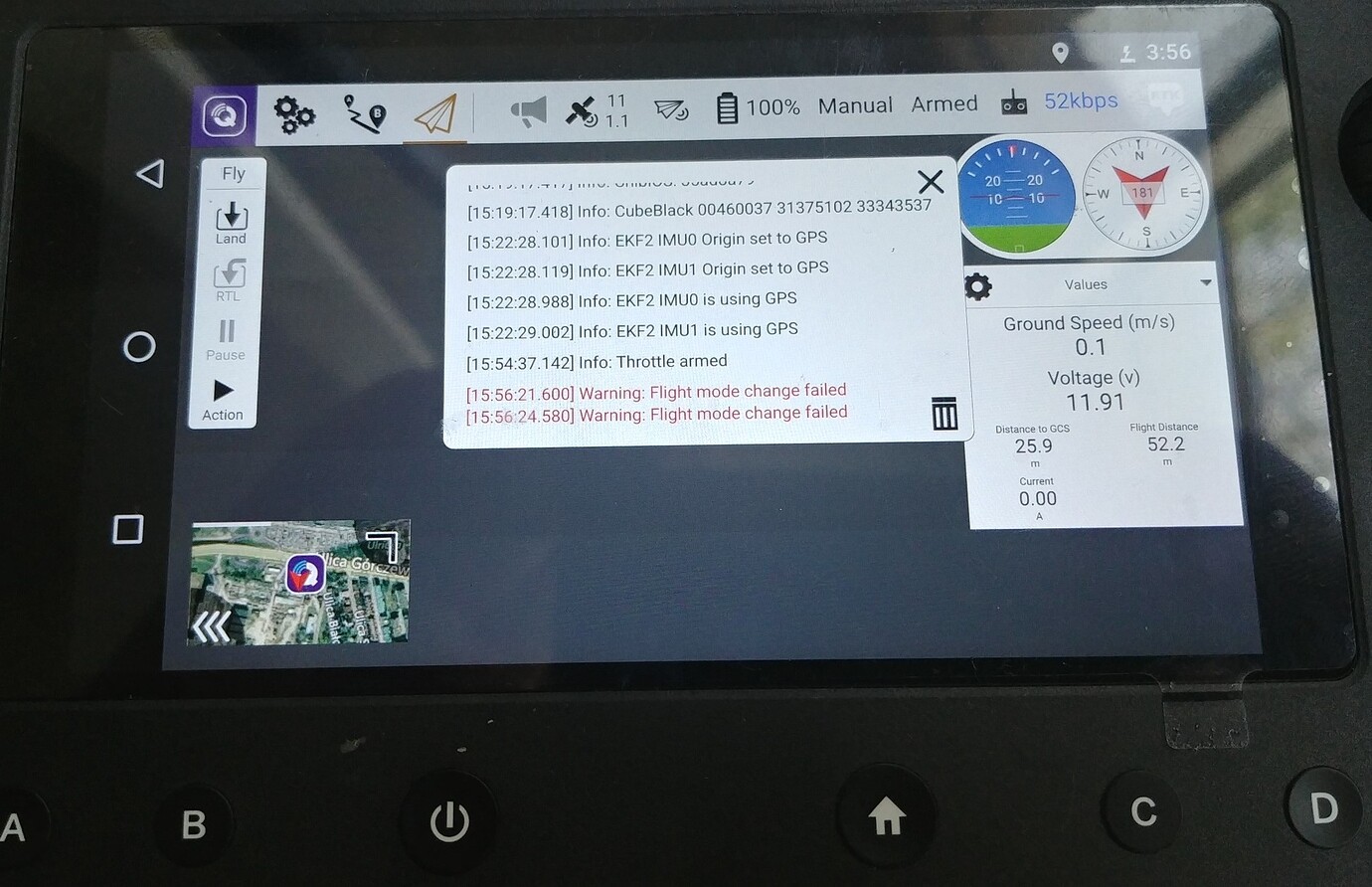
Hi, I am using the HereLink (latest stable version) for a unmanned boat (ArduRover V4.0.0) and gets some annoying warnings regarding flight modes as i turn on the device.
Mode switching works fine, but still gets a warning message: "Flight mode change failed message”.When I open the message it says:
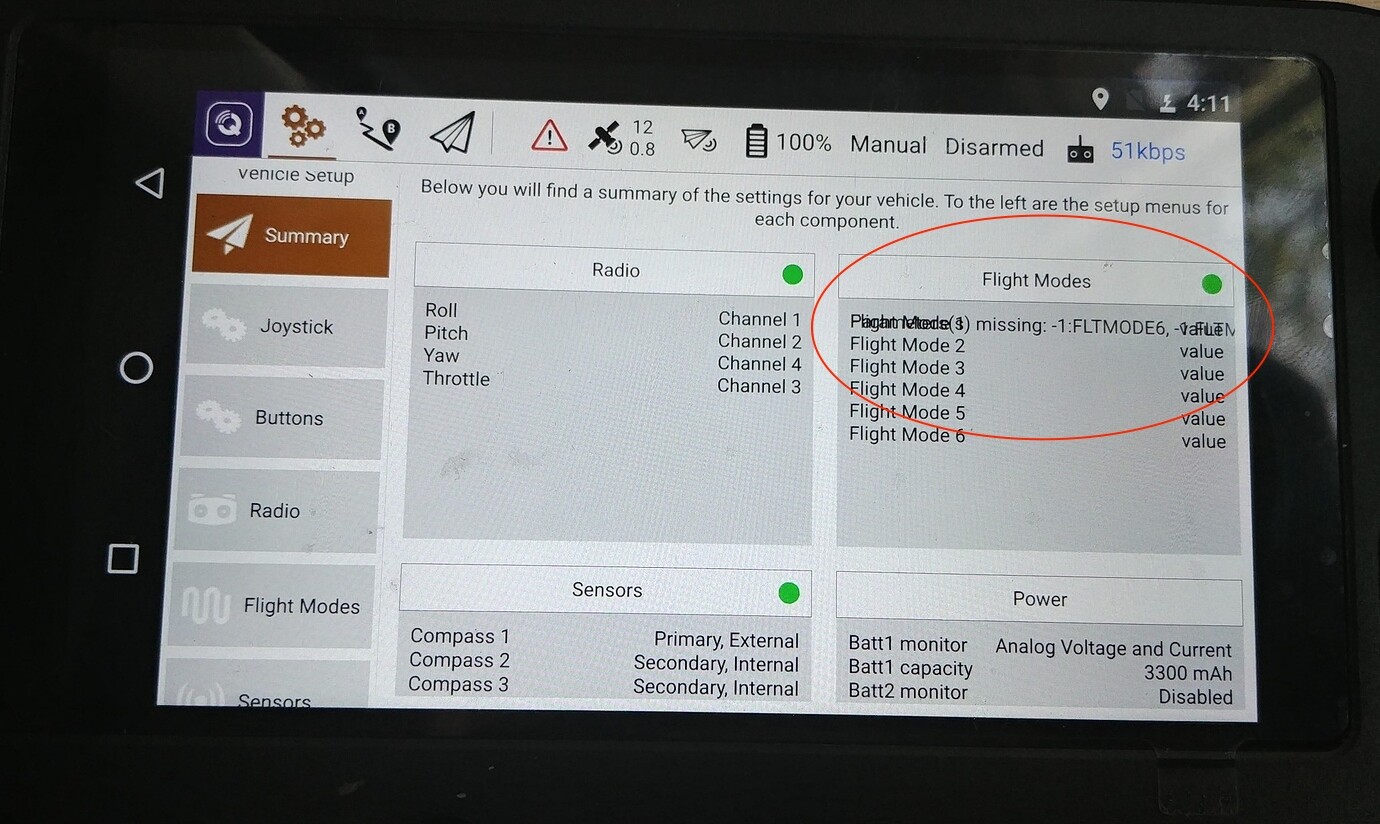
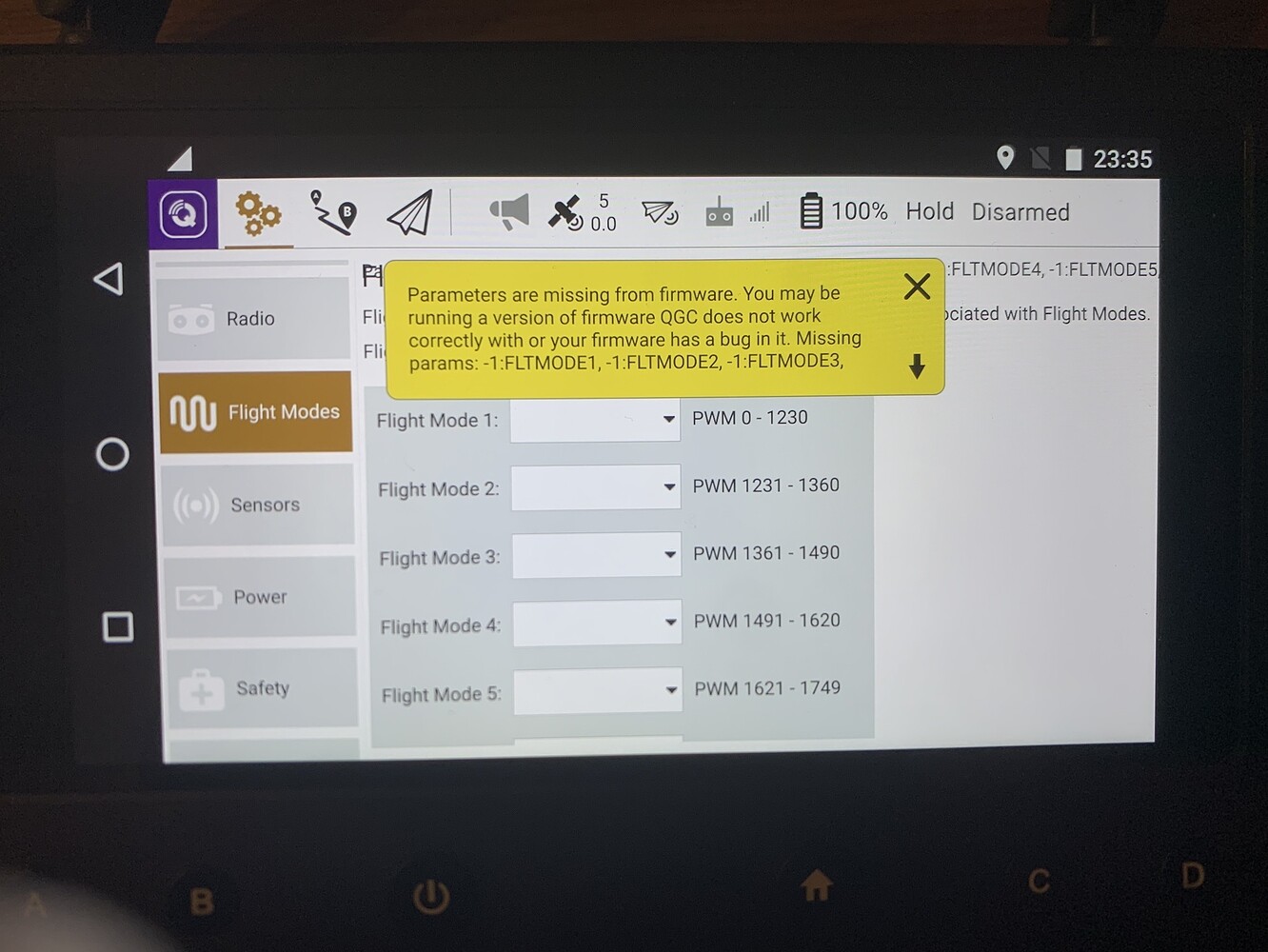
“Parameters are missing from firmware. You may be running a version of firmware QGC does not work correctly with or you firmware has a bug in it. Missing params: -1:FLTMODE6,-1:FLTMODE5,-1:FLTMODE4,-1:FLTMODE3,-1:FLTMODE2,-1:FLTMODE1”
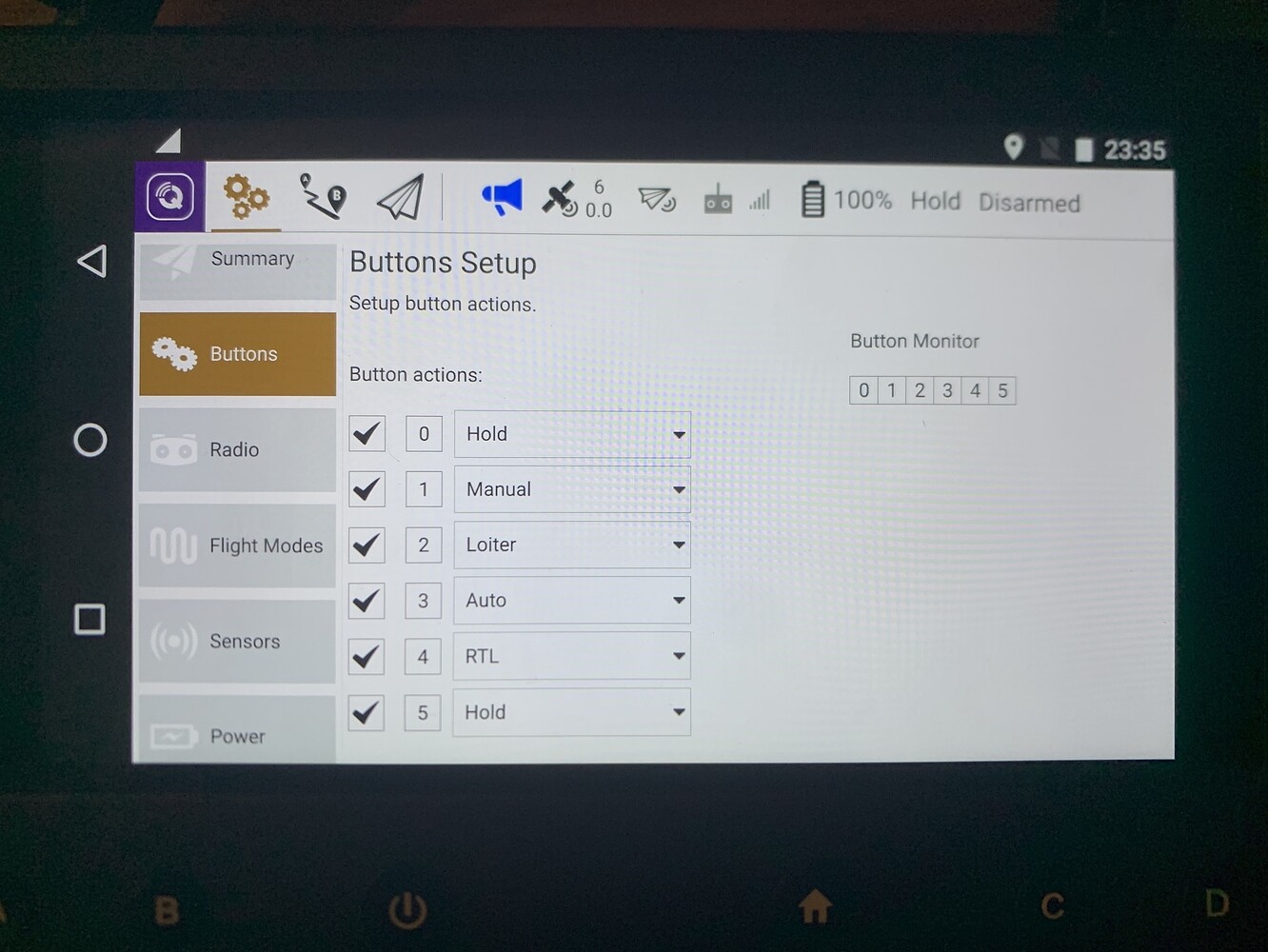
The flight modes have been set up correctly as far as I know. I have my desired modes set up for the buttons as displayed in attached the image. Those button settings also corresponds to my parameters.
How can I solves this warning issue? and potentially fix the issue with the Flight Mode Tab, which can’t be used for anything currently?
Best regards,
Kaspar