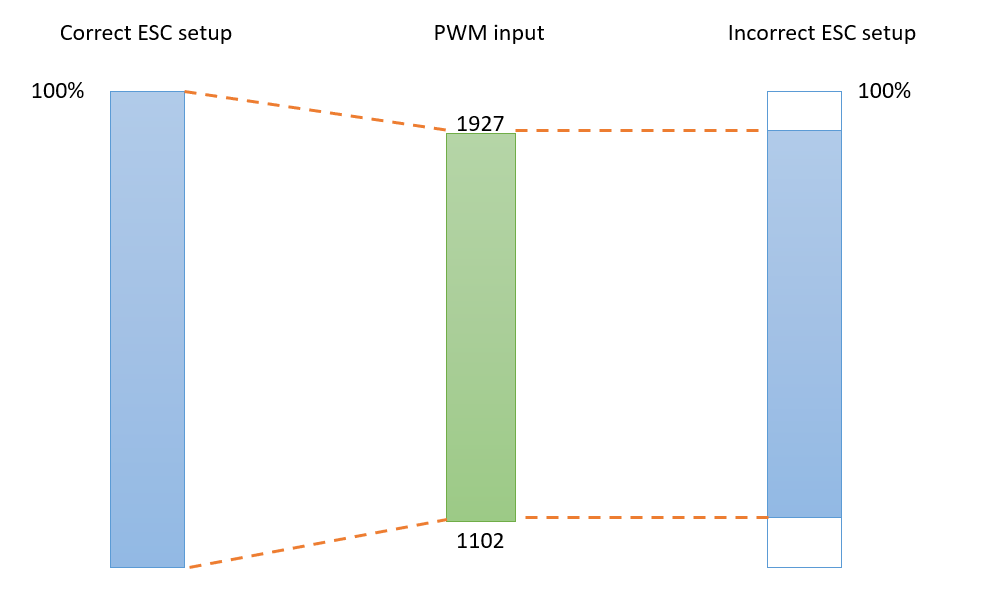
I’ll explain the details below but I’m having troubles getting the PWM range from 1000-2000us. I have set the RCx parameters to Max - 2000 and Min - 1000 but on my oscilloscope I only ever get 1927us max. I’ve tried calibrating on the Herelink app, ground control and mission planner and nothing seems to make a difference. When I do the radio calibration it goes successfully but it deems the max is 1927 and the min is 1102 and overwrites the RCx_MAX and RCx_MIN parameters.
I’m using the Herelink radio with the Matek H743-WING FC in a 1.5mx1m boat drone. I have two T200 thrusters on it with their own ESCs connected to the servo outputs on the FC. I am using ArduPlane V4.0.8 so there are a lot of customs settings to adjust for a boat.
The 1927us max is causing the boat to go 12% slower than my old setup with an FrSky Radio with X8R receiver so it’s quite critical I can get to full speed.
Thanks a lot for your help and let me know if you need more info!
We’ve tried rescaling the input PWM values on the ESC but haven’t had any luck - it seems to be the same problem where I can only set the max values instead of re-mapping.
Currently we are using the input type RCPASSTHRU with the intention that that FC just lets through whatever PWM signal it is given from the Herelink controller. However, we still can’t figure out why the top range of the joystick is 1927 and not 2000.
If we use another input like FLAP it uses the RC_MAX and RC_MIN upper and lower limits and the PWM range goes up to 2000 and even more if we set the limit. However, it is not linear, its like a switch for min-idle-max.
So is it either a software or hardware limitation of the controller? Can it be changed that can be changed if software is recompiled with new settings?