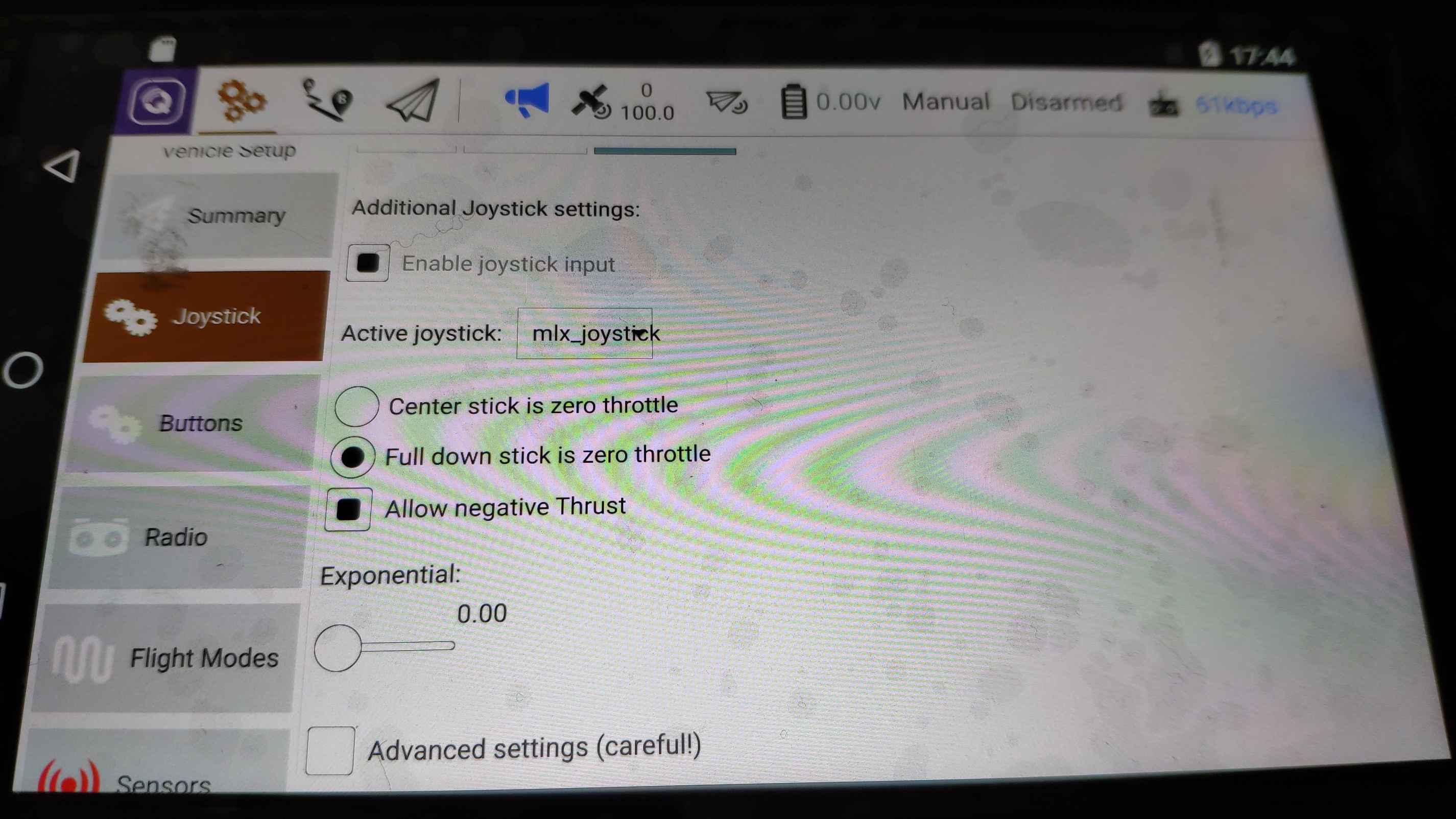
I solved the problem by checking in the Joystick menu the options “full down stick is zero throttle” and “allow negative thrust”. Without recalibrating!
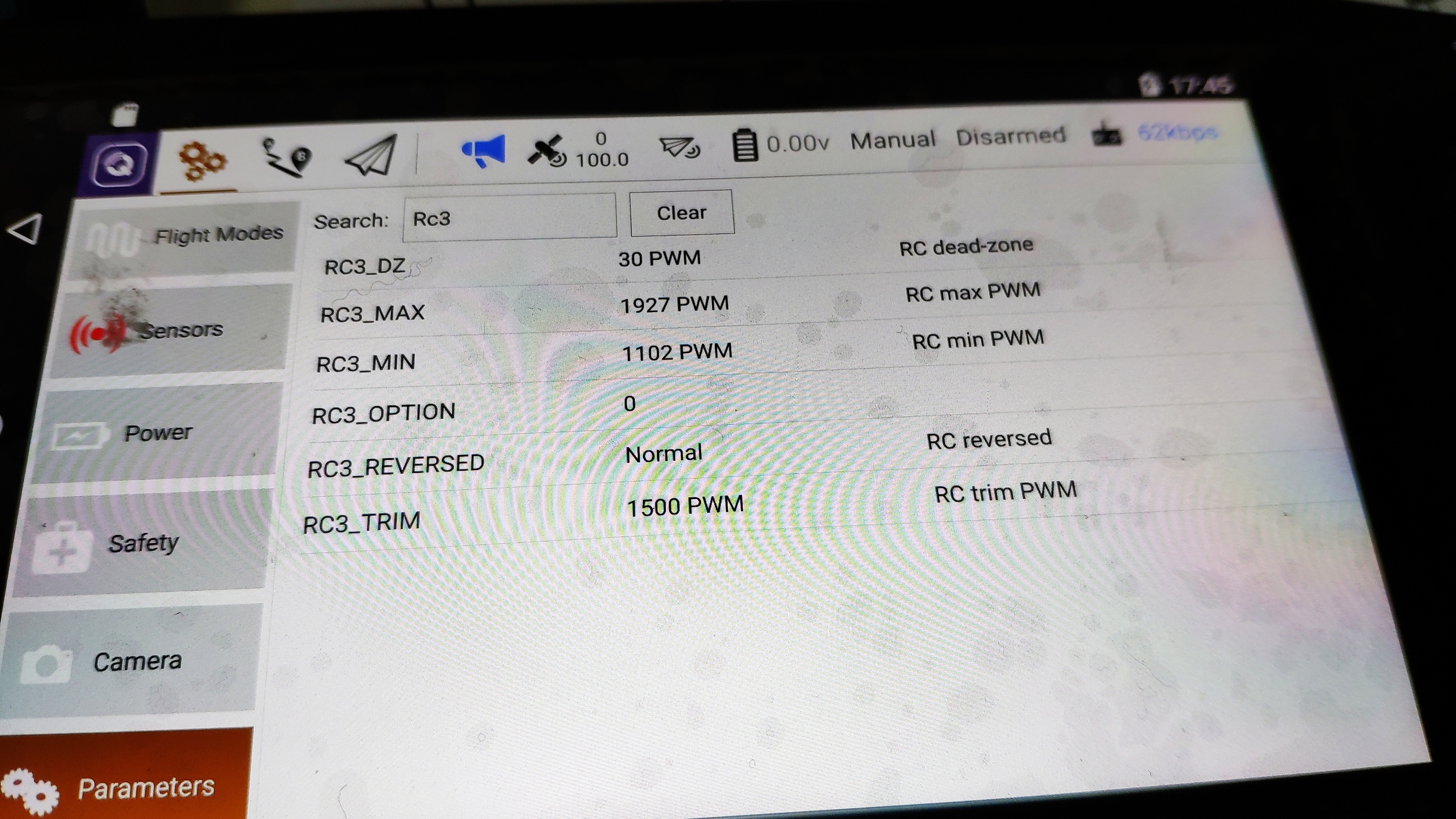
Then I forced the RC3_Trim from the Parameters menu to 1500 PWM.
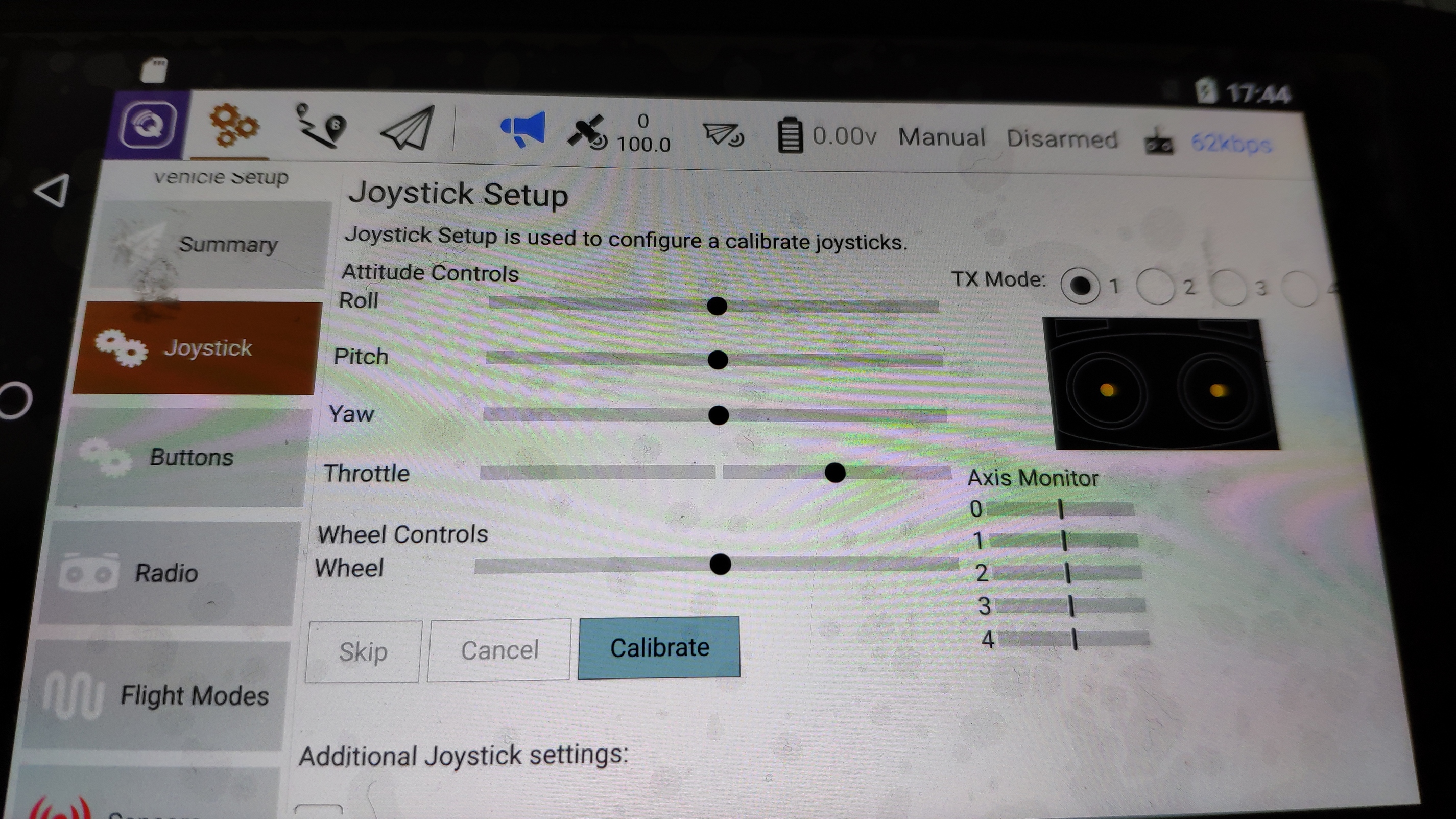
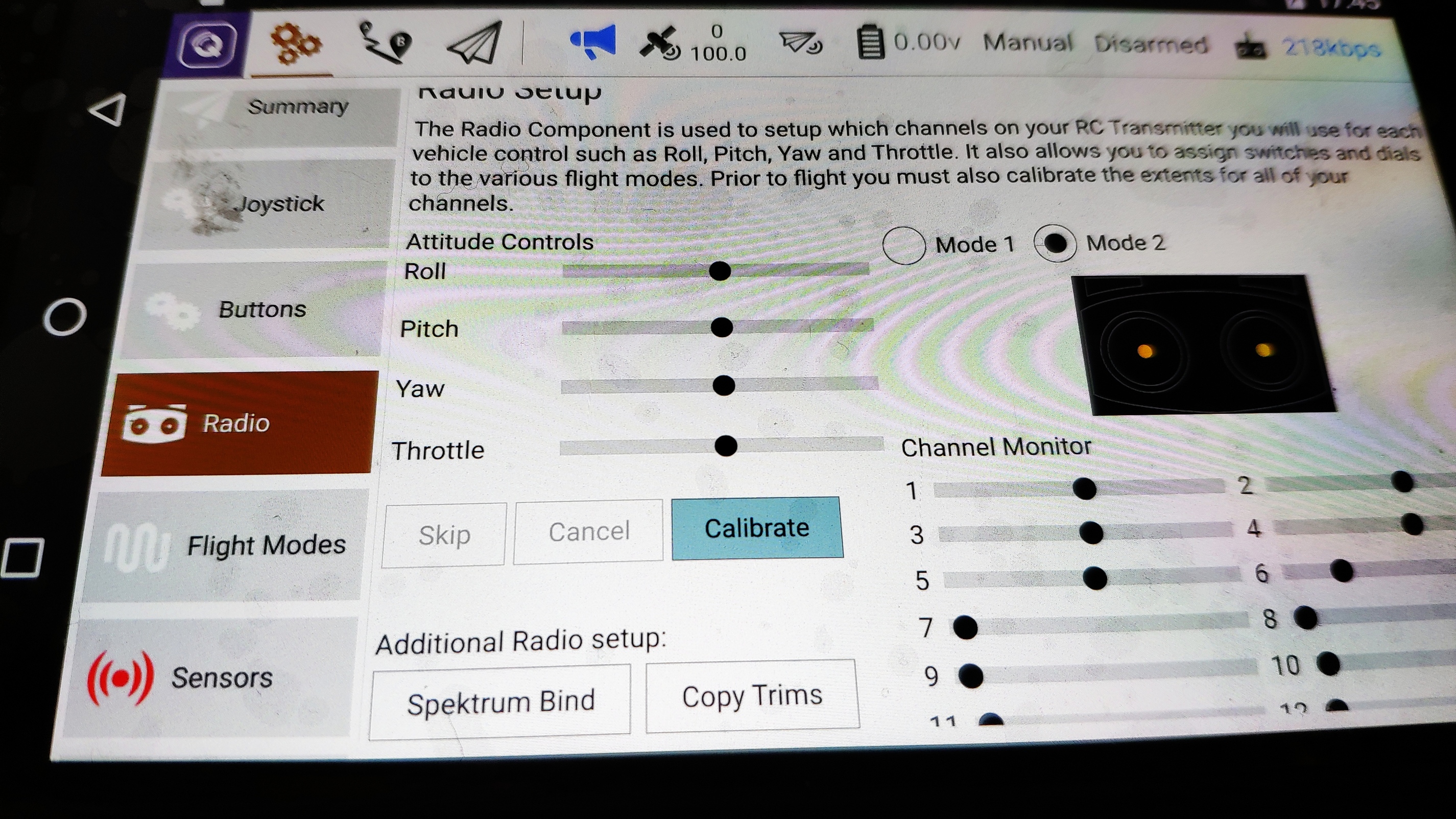
In the radio menu now the throttle appears centered although in the Joystick menu it appears offset.
Now the rover goes back and forth!
Thank you!