Hello everyone,
This problem is pretty particular to my setup as I use a custom companion computer, although it may have a common solution since it’s related to Herelink and MP.
Any help will be appreciated ![]()
Graphical summary
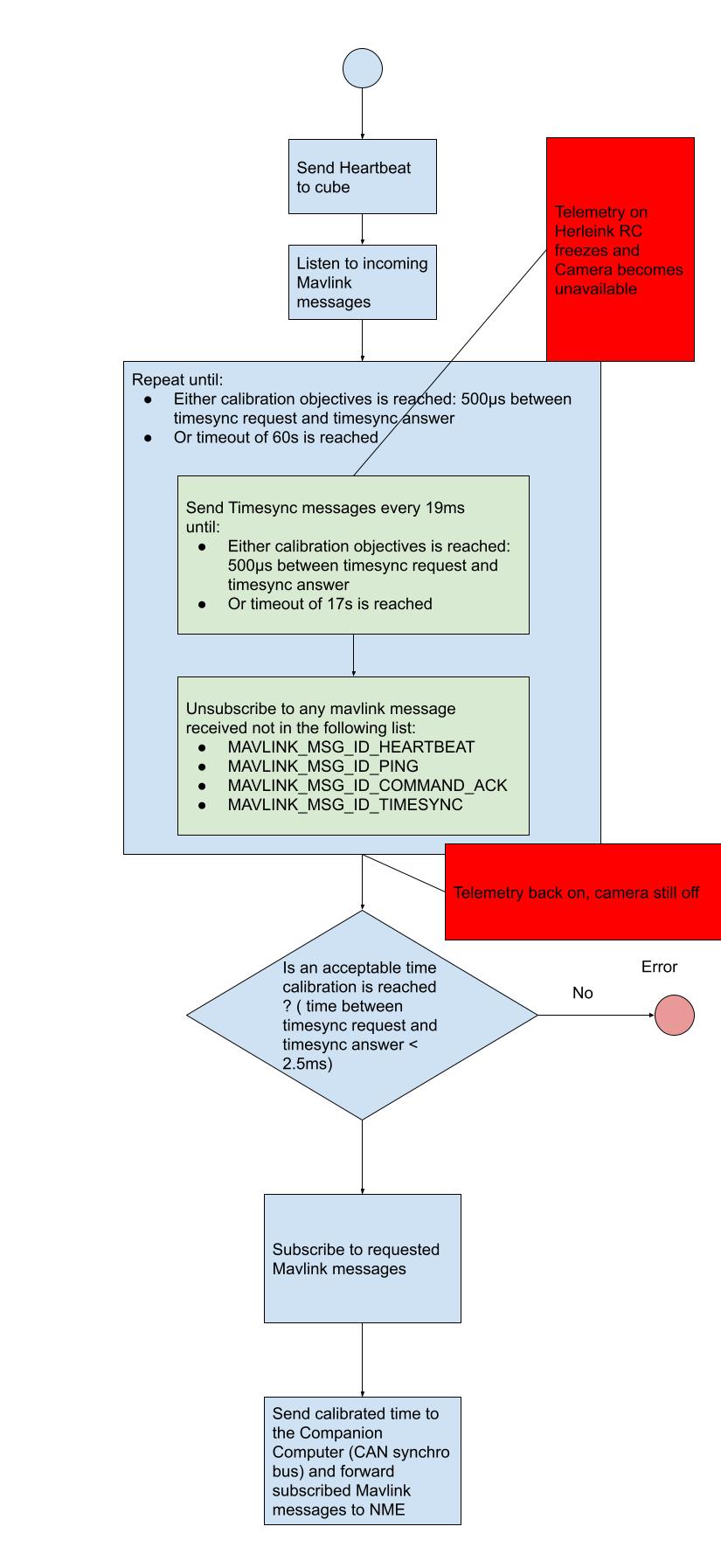
My attempt to graphically summarize the problem:
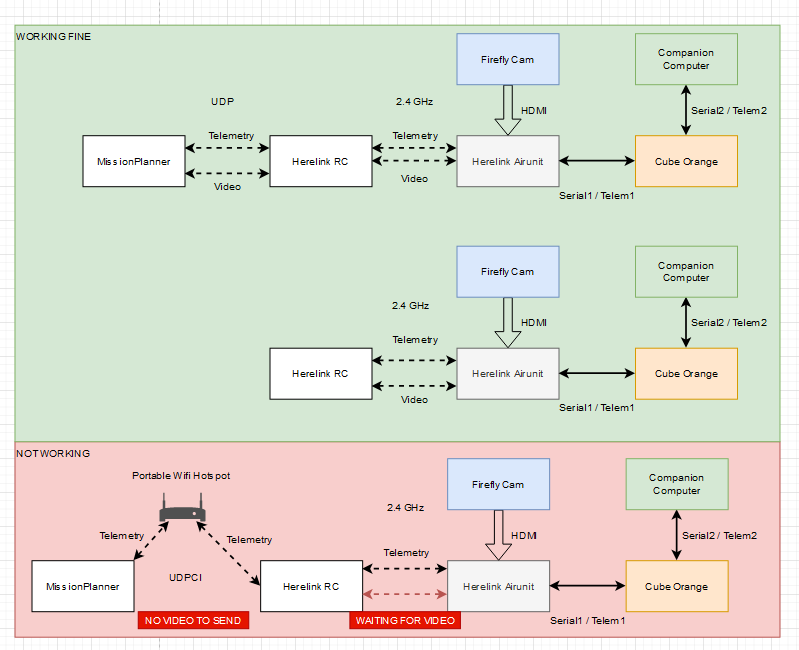
Usual behavior :
I am using a Cube Orange along with a Herelink and a Firefly Split camera to obtain a video stream.
Firefly cam sends its video stream to Herelink’s airunit via HDMI, Herelink sends the video stream to its RC (with QGroundControl), on which I am able to see the video.
If I connect my Herelink RC to MP via UDPCI or UDP, the params load on MP and I can still see the video on my Herelink RC.
Unusual behavior
When using my custom companion computer on Telem2, I lose the video signal completely. Herelink’s QGC stays in “Waiting for video”. This only happens when I connect to MP using UDPCI.
Companion computer
I am currently developping a companion computer for a specific application. This companion computer communicates with my autopilot via Telem2, using mavlink 2.
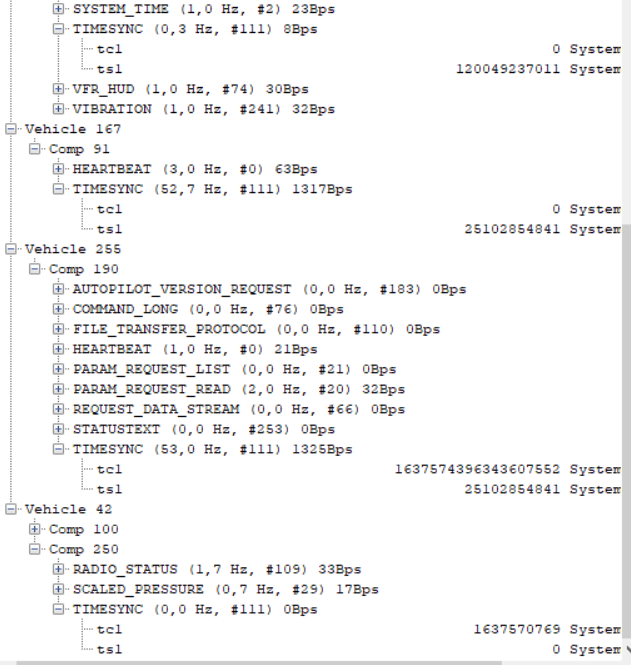
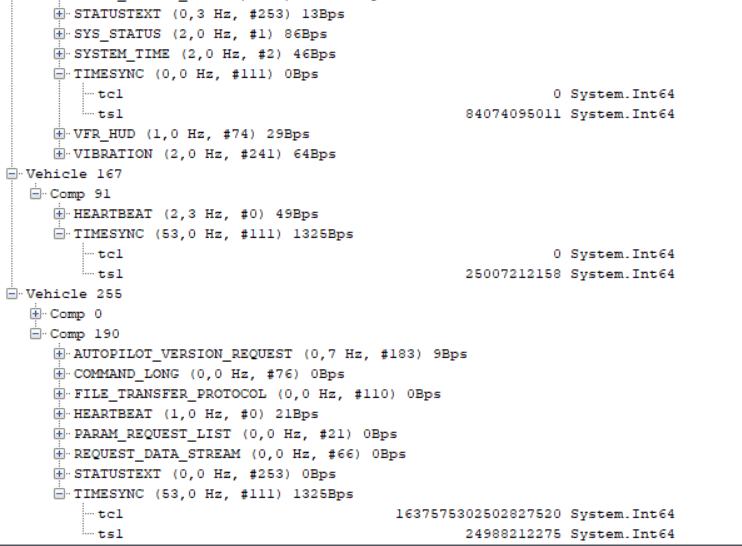
On boot, my companion computer sends a lot of TIMESYNC requests in order to get an optimal message travel time. Right before doing so, it sets all Mavlink messages rates to 0 (except Heartbeat etc) to “lighten” the mavlink data stream.
The video stream stops between the moments every rate is set to 0 and the moment I request a lot of timesyncs.
This right here lead me to think I was setting the wrong mavlink messages to 0 and potentially asking the autopilot to stop the video stream.
However I did not think my companion computer would be able to interact with my herelink airunit’s camera on HDMI via the autopilot’s Telem2…
As I learned not long ago, the camera DOES get a Mavlink ID, and Mission Planner also asks if I want to connect to the video stream on startup (only when i first connect the RC to MP at the beginning of the day, I then leave the RC on and MP connected to it for all my next flights and MP does not ask again if i want to connect to the video steam)
What’s strange :
This happens ONLY when my Herelink is connectected to MissionPlanner via UDPCI.
This does not happen when my Herelink is connected to MP via UDP, nor when the Herelink is not connected to MP. Video stream stays on QGC.
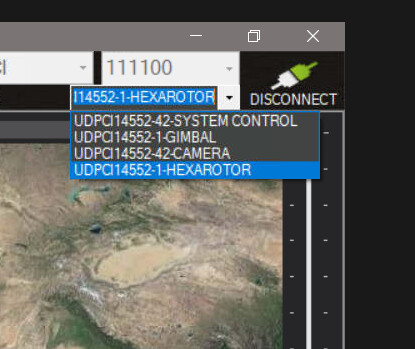
Moreover, when connecting to MP using UDPCI, the device list shows a MavID 42-Camera next to my 14-QUADROTOR
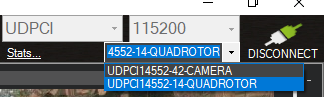
This MavID is not there when I connect to MP via UDP.
I searched through all Herelink’s, MP, and Arducopter params, I never found any reference to this MavID 42 for the camera.
If you are still reading, thank you so much, I’m looking forward to solving this problem with you