Greeting to this great community. Recently, I got some problems and was seeking desperate help from you guys.
Had a very good stable flight for 20 mins and suddenly the Hexsoon crashed.
No errors, nothing … just EKF lane change and gone (this is my guess).
I even had EKF failsafe set to Land but the bird fell directly from 10m altitude.
I have observed some vibration in Z-axis in my quad while doing simple maneuvers like a straight-line motion at 5m/s but those values were under 30 as suggested in the wiki.
I would really love to hear your comments and implement the same for a safe flight.
I am uploading the log of the flight.
@Alvin, looking for your valuable comments too
Please help
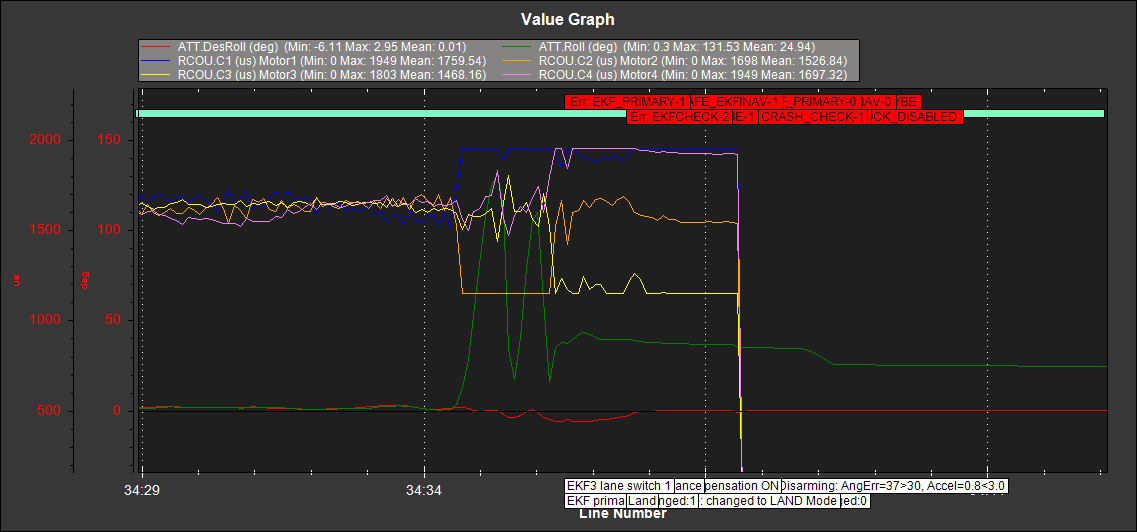
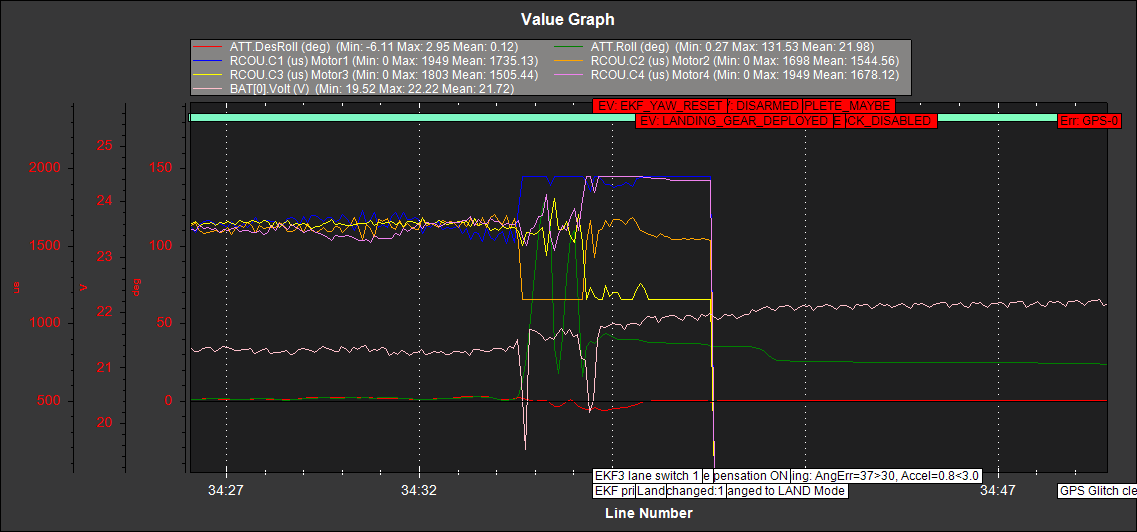
When achieved attitude started mismatching desired attitude, there was a sudden voltage drop.
Also RCOUT.C1 went maximum and C2 went minimum. This tells motor 1 was maybe not responding to the control. Thus ardupilot try to raise its output to regain control.
Thanks, @Alvin for taking the effort and giving valuable comments on my drone.
I checked the motors and ESC and found the following
One of the wires from motor_1 to ESC was out/cut. What I want to be sure of is, whether this has happened in flight (as suggested by you) or can be an outcome of the crash. Please, if possible give your comments so that I can conclude.
When the drone crashed it was the 4th motor that hit the ground first and took all the crash load (I think so based on the damage, but am not sure). I have a theory that maybe it was motor_1 and motor_4 which took the crash and in that the motor_1 lost the ESC wire.
One more thing, there is consistent clipping in IMU2 and there are over 400 clippings in that, can that be a reason. Is vibration is something I should be worried about in current setup (do I need to change something in structure)
The log won’t tell us about physical status of the copter, unless you had the camera filming itself like SpaceX does on their rockets…
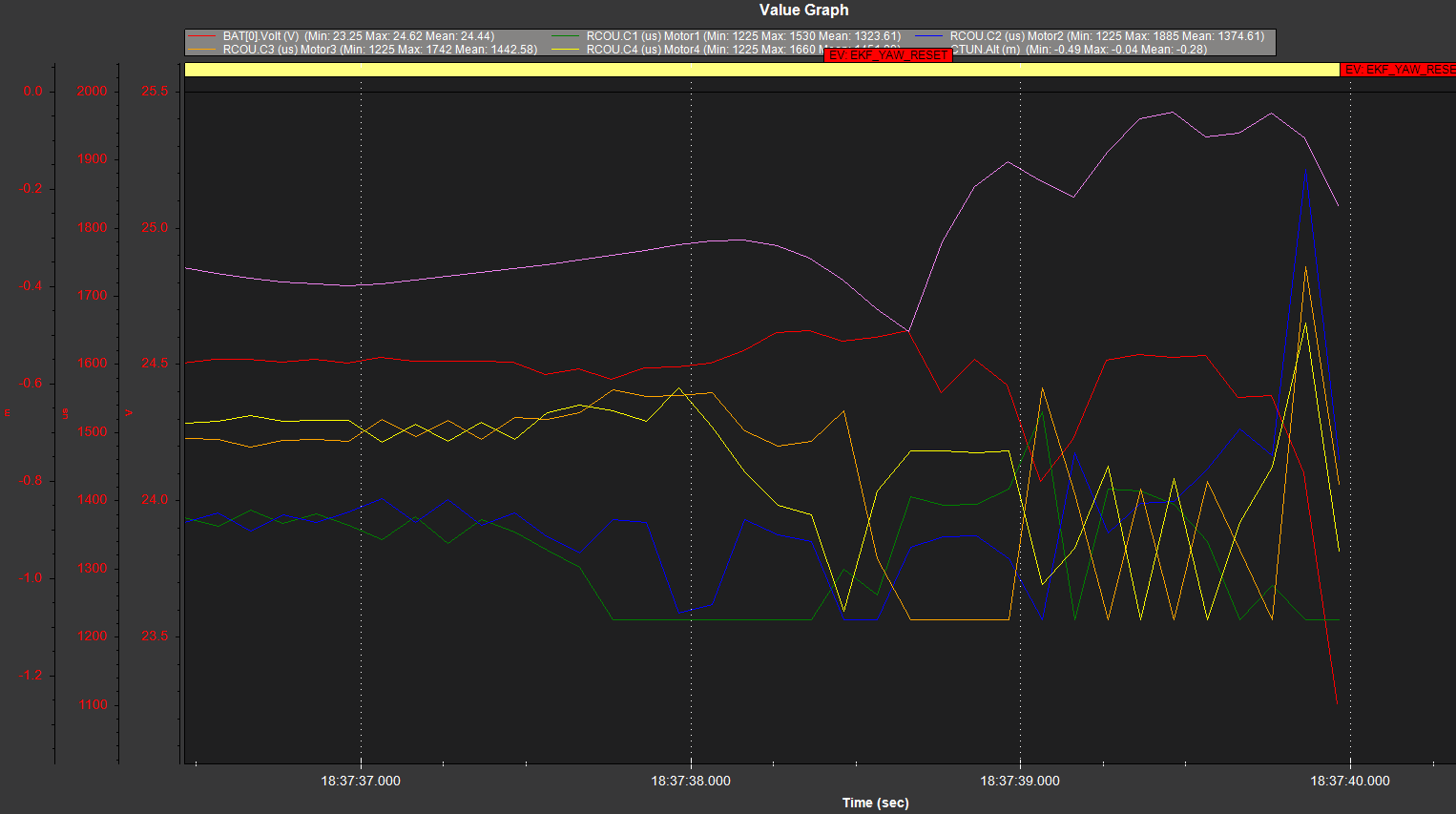
You can check the time axis in the log, motor 1 went maximum before it hit the ground. Going maximum means not responding to the input from autopilot.
IMU2 performing worse than other 2 is expected, because it is not sitting on the vibration isolated board. I’m not sure what do you mean by “clippings” but EKF should be able to handle the vibrations.
Hi alvin, i’m having the same problem. my hexsoon 650 crashed and on the herelink it said ekf lane switch 1.
it all started when i took off on loiter mode and it was hovering just fine for a few seconds and den it started to roll to the right by itself. i tried to bring it down and control it but there was no input. please help.
here is the flight log for your reference. let me know what you think. thank you. 31 19-5-2022 4-37-38 PM.bin (372 KB)