Posted this in Facebook group a few days ago and realized I probably should have posted here.
Alright all I had another test flight tonight on the new tune and found an issue that I’m hoping you can help with. When I violently throw the copter left to right full stick repeatedly then let the stick center the copter levels and regains control. When I do this front to back (aligned with flight controller) this becomes self-looping and results in a crash if I’m not very gentle in fixing it. Any thoughts? Log:
Should I try this again? It does seem like my GPS mast vibrates a bit while in flight (but I think it did that pre auto tune as well).
As far as balance goes this is the quad - not sure what else I can do to balance it up, the battery typically sits dead middle underneath during flight.
But I have no idea how did your copter go into that situation. Early before this moment you had a more aggressive rc input. But at that time the copter handled perfectly.
Should I try this again?
Can you carefully try if this is repeatable?
May be the aggressiveness of the pitch should be limited.
Also, it is possible that the copter cannot handle such a aggressive command.
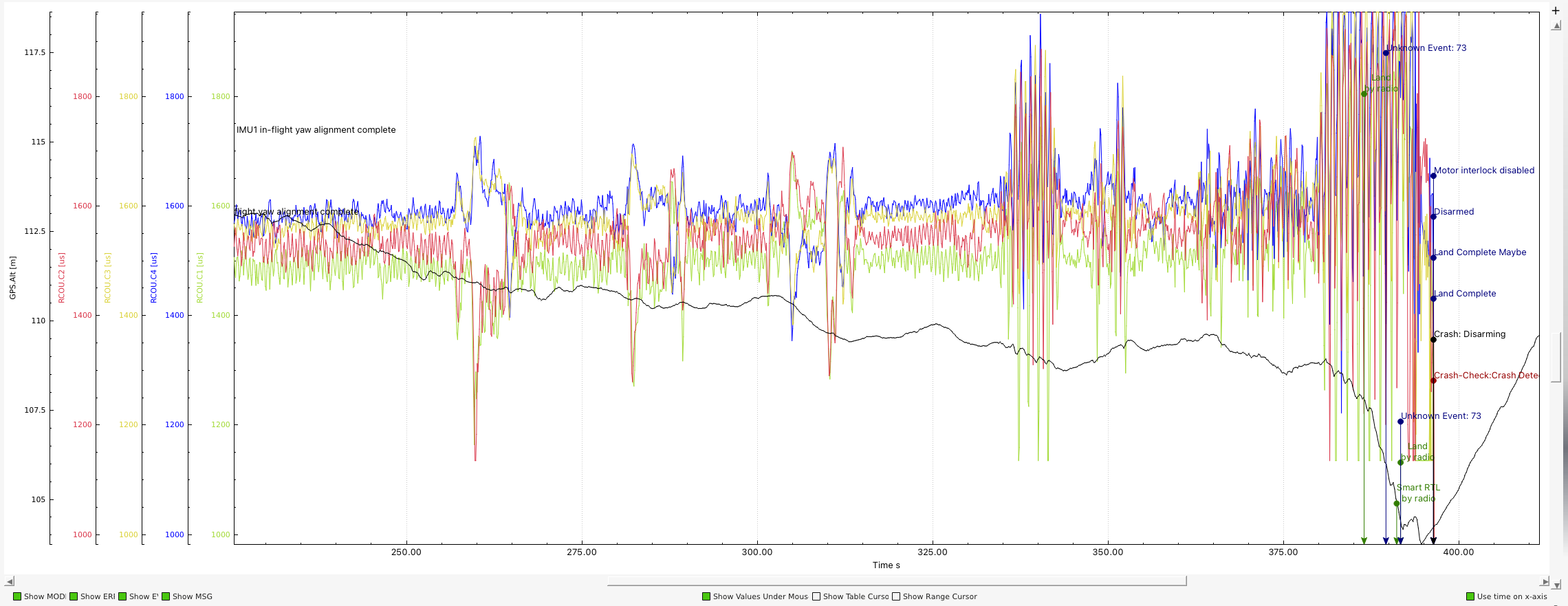
Thanks for taking a look. I was doing aggressive maneuvers to test the tune and see how the quad handled before I attempted any auto flight modes. In that last oscillation I couldn’t control it and when it crashed it did end up upside down. You can see I attempted to stop the oscillation by flipping it to the land flight mode.
I had the initial oscillation and was able to stop it then for some reason thought it would be good to try again. In that second instance I was unable to rescue the quad
Luckily no damage just cut up the dirt a little. If it’s simply that it cannot handle such aggressive moves that is fine, just scares me that if it encounters a strong headwind that induces the oscillation that it will crash in auto.
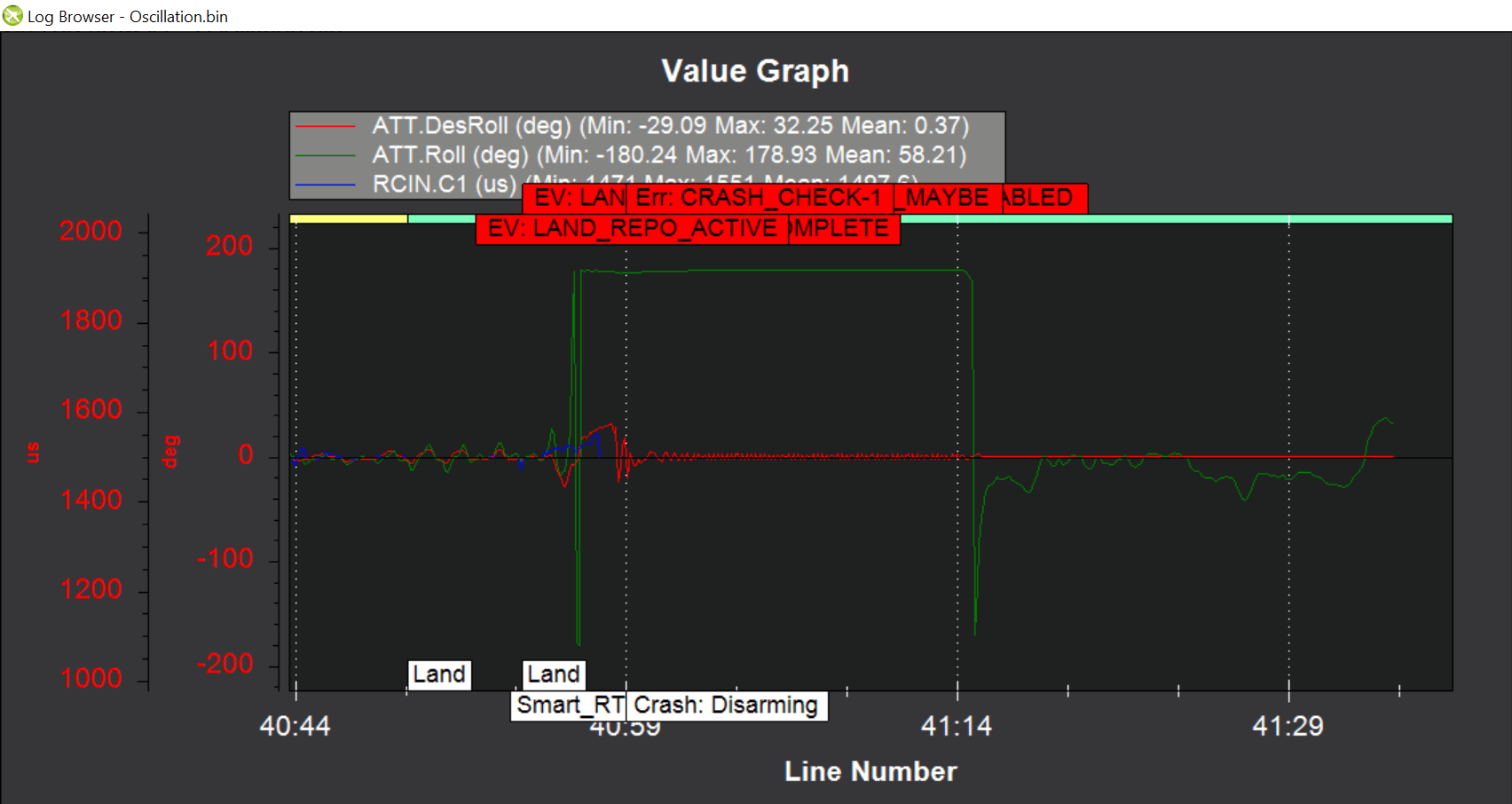
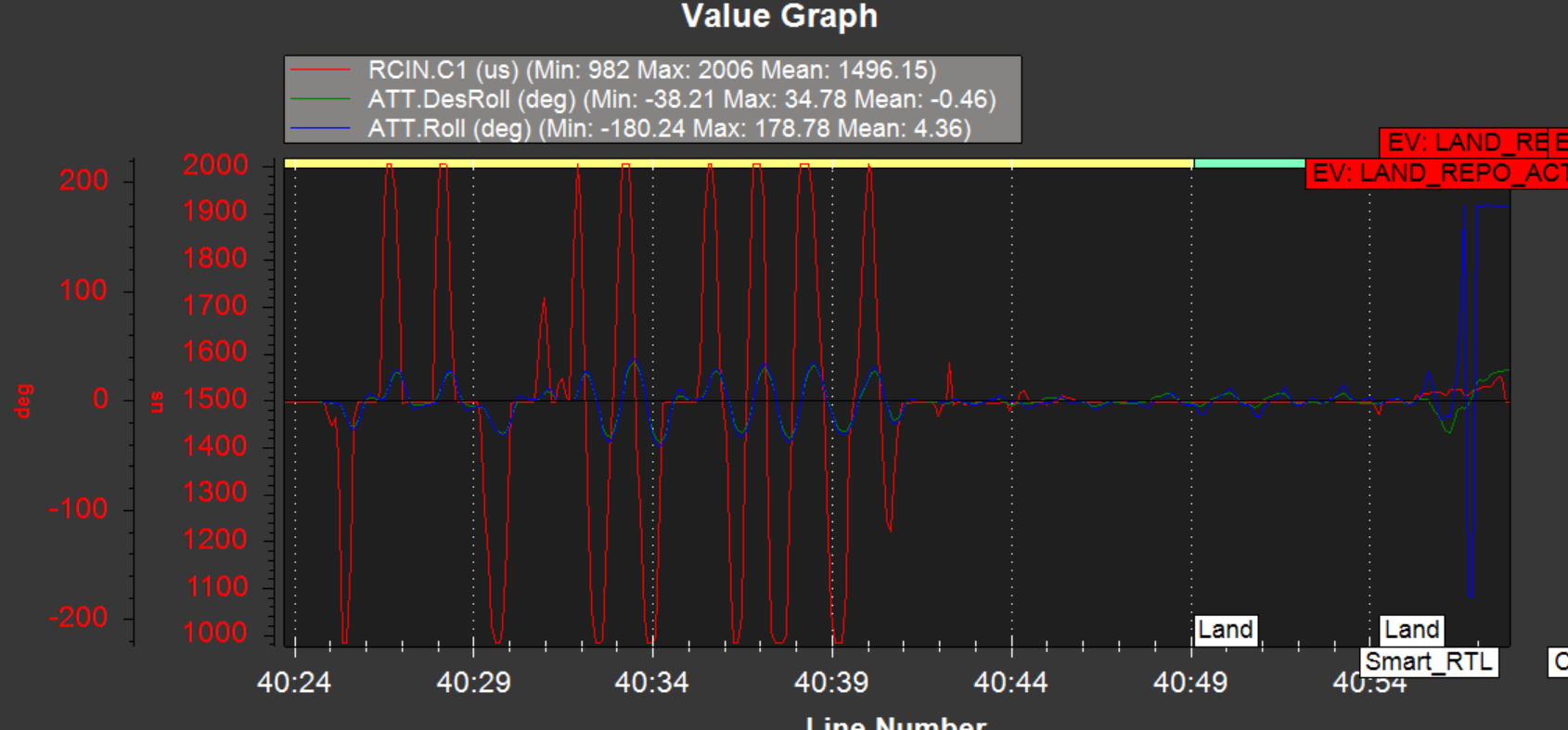
From the ATT.DesRoll and ATT.Roll you can see that the control and outcome were pretty close. That means the oscillation was due to the self-control from ardupilot.
You copter did not lose control. It’s more likely the previously tuned PID doesn’t fit to recover from this too-aggressive movement. You may need to adjust or manually tune for these extreme situations.
Thanks for this - is there a guide somewhere that shows how to manually tune for this type of situation or would you recommend running another auto tune?
I would make ATC_ANG_PIT_P higher, close or equal to ATC_ANG_RLL_P, about 10
And Rate Pitch PIDs equal to Rate Roll PIDs:
ATC_RAT_PIT_P,0.1325
ATC_RAT_PIT_I,0.1325
ATC_RAT_PIT_D,0.0076
Definitely also set these:
BATT_FS_LOW_ACT,2
BATT_FS_CRT_ACT,1
BATT_ARM_VOLT,11
BATT_CRT_VOLT,10.5
BATT_LOW_VOLT,10.8
MOT_BAT_VOLT_MAX,12.6
MOT_BAT_VOLT_MIN,9.9
If you get battery voltage and failsafe warnings, DO NOT adjust these settings. Your battery voltage is actually sagging quite low and maybe the battery or a connector is faulty. Fix that without changing those voltage settings I listed.