Hi all,
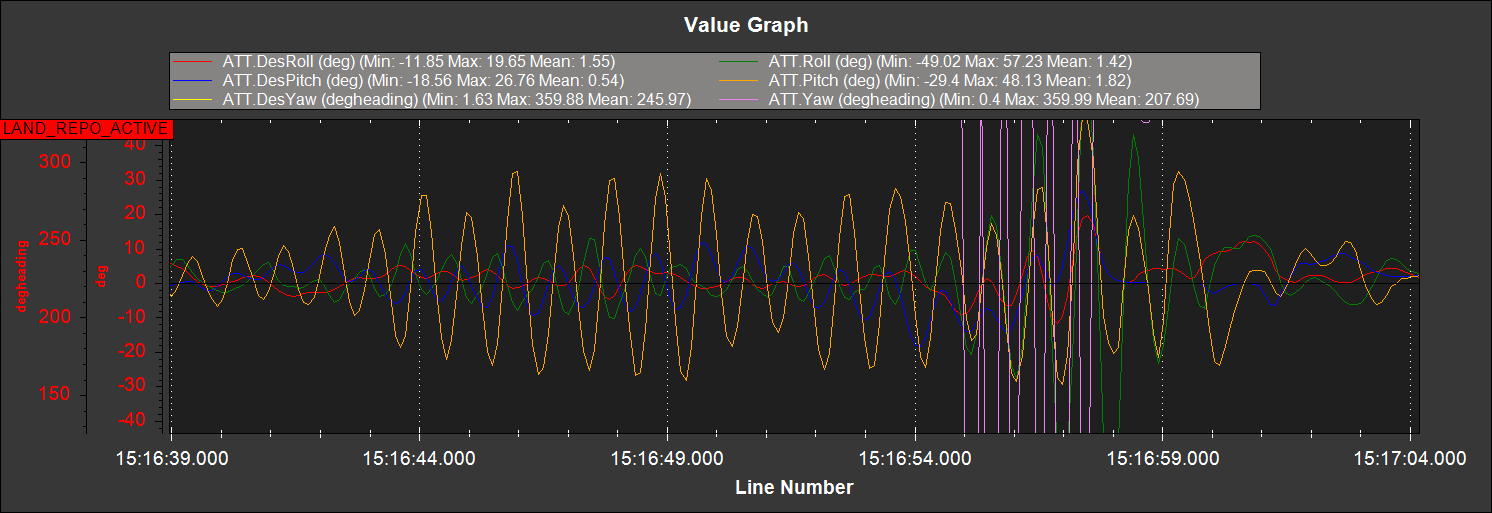
I was flying my drone today it seems to be fine in alt hold and loiter mode.But when ever i do the RTL mode while landing oscillations came into picture. I have tested landing thing in alt hold mode but while decreasing height the drone become unstable and oscillations induced. It was really bad. Hopefully i didn’t crash. I am unable to understand what i am missing.
i am attaching the log file for the same. Need guidance.
updated log link is mention below. Please guide.
https://drive.google.com/file/d/1BPcCW2Ed8hsO5WJemW-0fm6hEOKChWep/view?usp=sharing
Any video ?
no video

Here 2 (as an external compass)
I have done the changes and fly the drone. It was flying fine but while descending it un-stabilize lesser as compared to previous in 1 out of 4 lights. So I try auto-tuning and did it yesterday. It was flying fine and I have tested a few flights of 80m altitude.
Today I tried the same I fly it at 120m altitude and then RTL it, the frame was stable with vibes. Then I reboot the system and did a takeoff, then it suddenly oscillates and crashed.
Below is the Bin file attached for both flights
120 m altitude flying
crash at takeoff after 120 m flight
Guidance required.
@Michael_Oborne @sidbh @philip @Julien
Please guide
Can you describe your setup and list every parts (pictures are welcome)