hello everyone, I’m trying to run dronekit codes with raspberry pi, but I can’t connect cube orange, it says no heartbeat. What’s the solution?
Are you using gpio uart or usb uart?
Hi!
This video is very straighforward of how to do it.
 | The Ultimate Project Drone")
Works for me.
bye
I’m connecting to uart via telem2
thanks for the feedback, i did the same but still getting the error so did you use cube orange
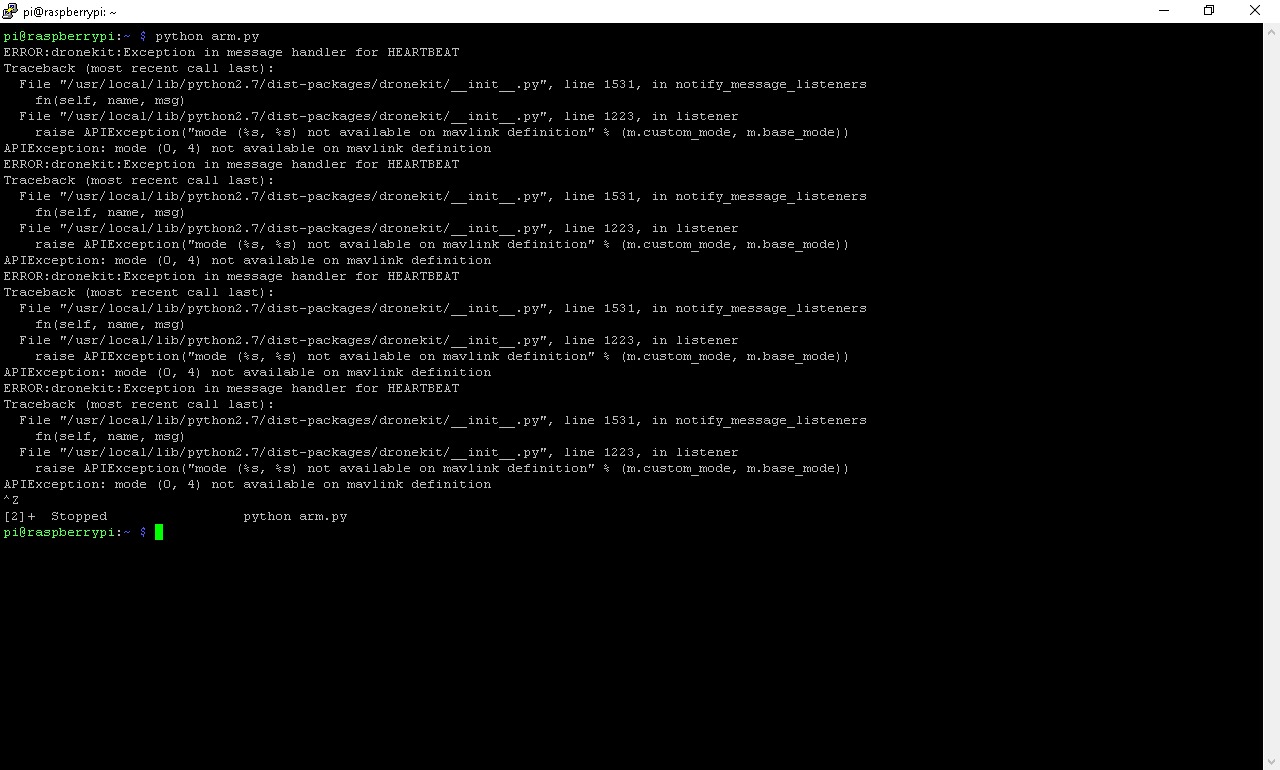
now i am getting this error ERROR:dronekit:Exception in message handler for HEARTBEAT
Traceback (most recent call last):
File “/usr/local/lib/python3.7/dist-packages/dronekit/init.py”, line 1531, in notify_message_listeners
fn(self, name, msg)
File “/usr/local/lib/python3.7/dist-packages/dronekit/init.py”, line 1223, in listener
raise APIException(“mode (%s, %s) not available on mavlink definition” % (m.custom_mode, m.base_mode))
dronekit.APIException: mode (0, 4) not available on mavlink definition
.
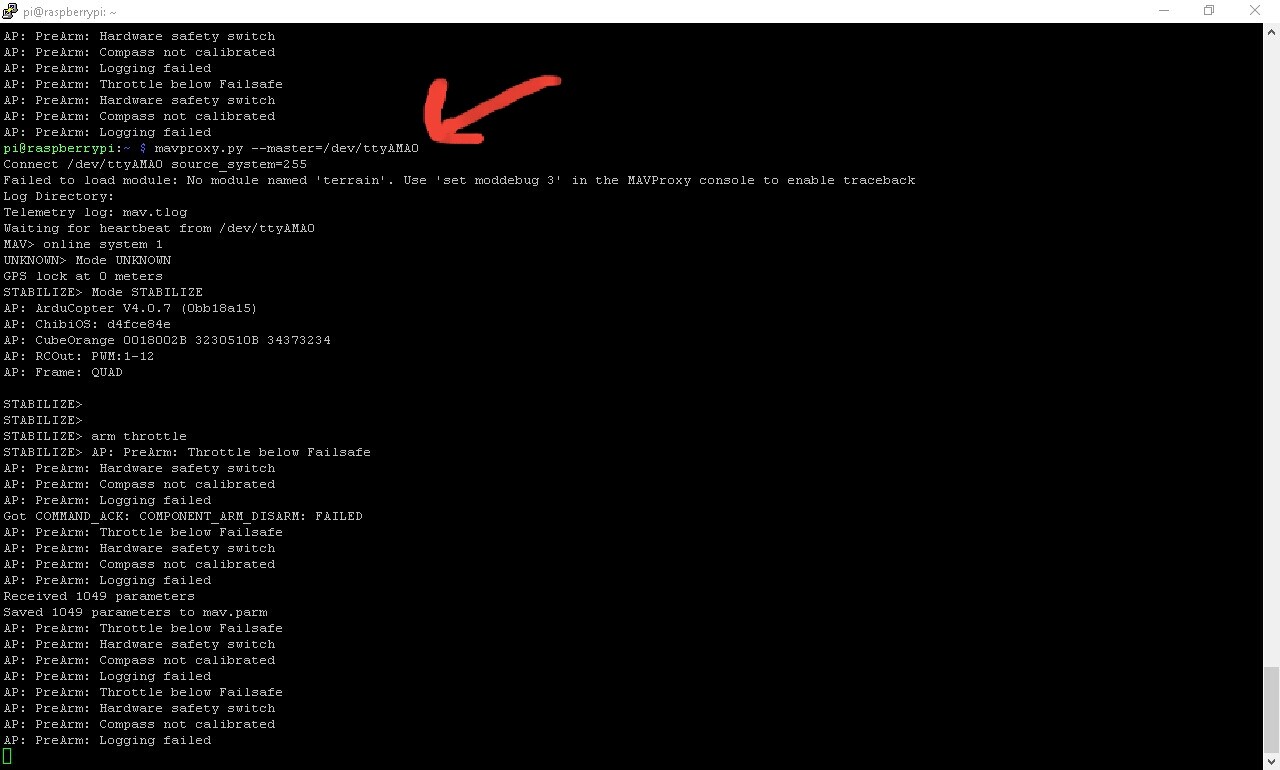
I can give orders to cube via mavproxy.
If you are using gpio for connection for 3b or newer, you have to disable the bluetooth because it occupies the gpio tx/rx.
this is my links.
this is the code i use:
{
from dronekit import connect
vehicle = connect(‘/dev/ttyAMA0’, baud=57600, wait_ready=True)
print(“I’m connected”)
}
I can connect with mavproxy.
the error i got:
my reference is https://youtu.be/kB9YyG2V-nA .Thank you for your interest
Can you try on telem1 and see if you would get the same error?
which firmware are you using? ardupilot or px4?
arducopter v 4.0.7
unfortunately still same error, i will change another parameter from mission planner serial2.
It’s weird that Cube Orange can be connected through mavlink but not dronekit.
Can you confirm there’s no other problem/service occupying the connection?
we have some experience in these works. is there any resource you can recommend? We actually built everything from scratch. I used the Communicating with Raspberry Pi via MAVLink — Dev documentation and https://youtu.be/kB9YyG2V-nA this link. thank you
Yes. I made a few companion raspberry pi setups.
And the same way works on my pi 4b.