Absolutely!
IMU 1 and two give you a redundancy on physical IMU failure, but as they are mounted on a seperate board, if something happens to that board, then you loose both IMU’s
So by having one IMU mounted to the FMU board, we eliminate the risk of being left without an IMU.
There are multiple scenarios where this could happen that are a lot more normal than people may think…
For example, if you hit a harmonic frequency of the isolation board, the IMUs could be much worse than the fixed unit… in this case, The third EKF will take over and keep your vehicle safe.
The other thing that it is there for is as a truth indicator.
When you have a log, it’s good to know what is really going on for your airframe.
Vibration is bad for mechanical devices, but if you have no indication of what vibration is really going on, how can you eliminate it?
Can you tell what is the resonant frequency of the isolation board? I’m looking to mount Cube Black on a helicopter with relatively slow rotor (800 rpm. I can only hope to minimize vibration sources to some degree. I’m wondering if I’ll need a custom vibro-isolation board.
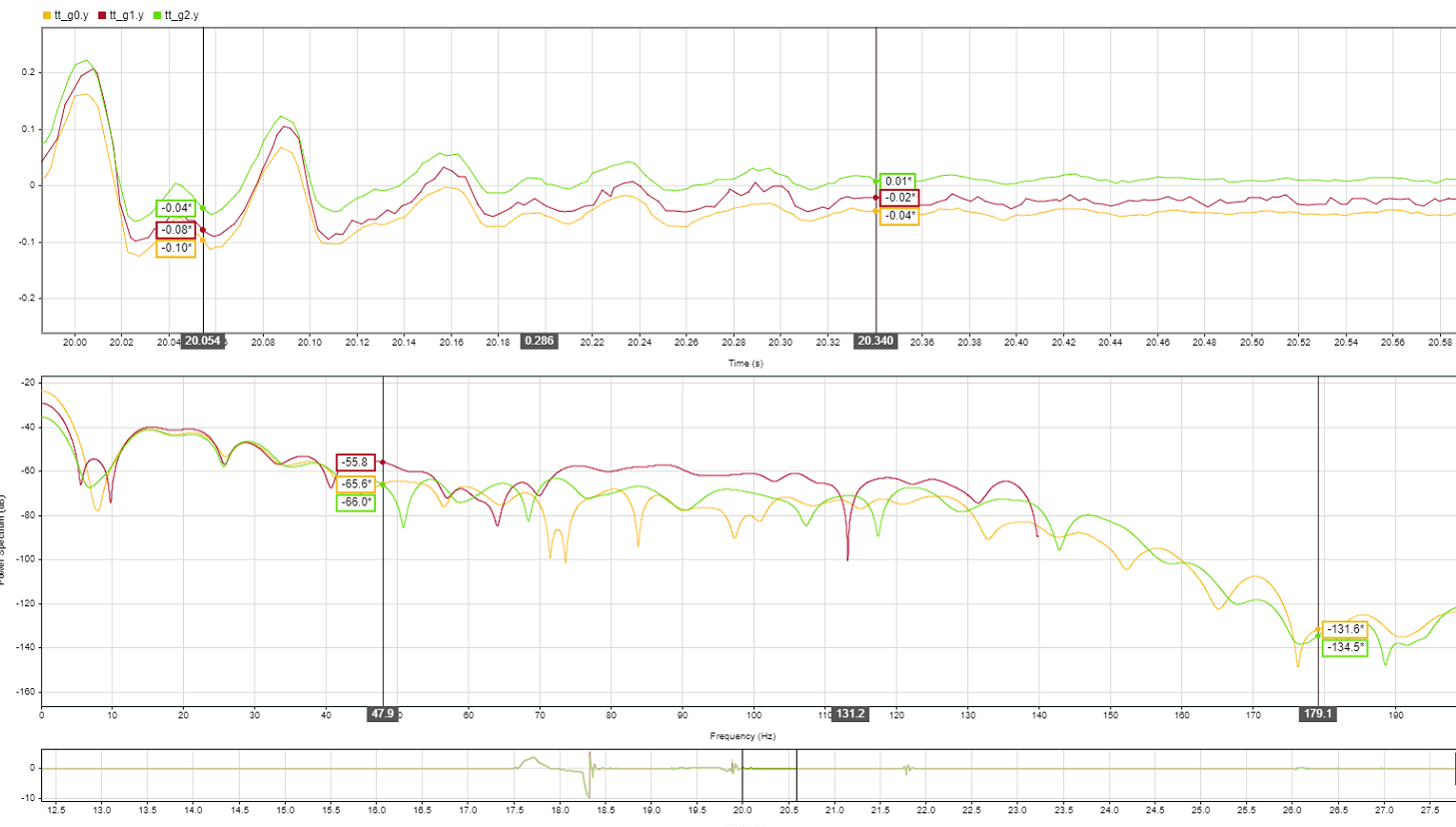
I never said I didn’t do that. I just asked about the natural frequency of internal isolation board. I tested this myself by logging all accelerometers and gyros. It seems that the natural frequency is around 15-25 Hz but it’s heavily dampened. However I cannot see a substantial difference between any of the gyros. It’s as if all of them were isolated.
Gyros plot after light drop test of Cube:
I already measured the vibration of our heli and the results are non-surprising. There are strong vibration with the frequency of the rotor speed. Second harmonic (for every blade passing) is the strongest and further harmonics are present.