I’m trying to diagnose cause of ArduCopter EKF3/IMU failures.
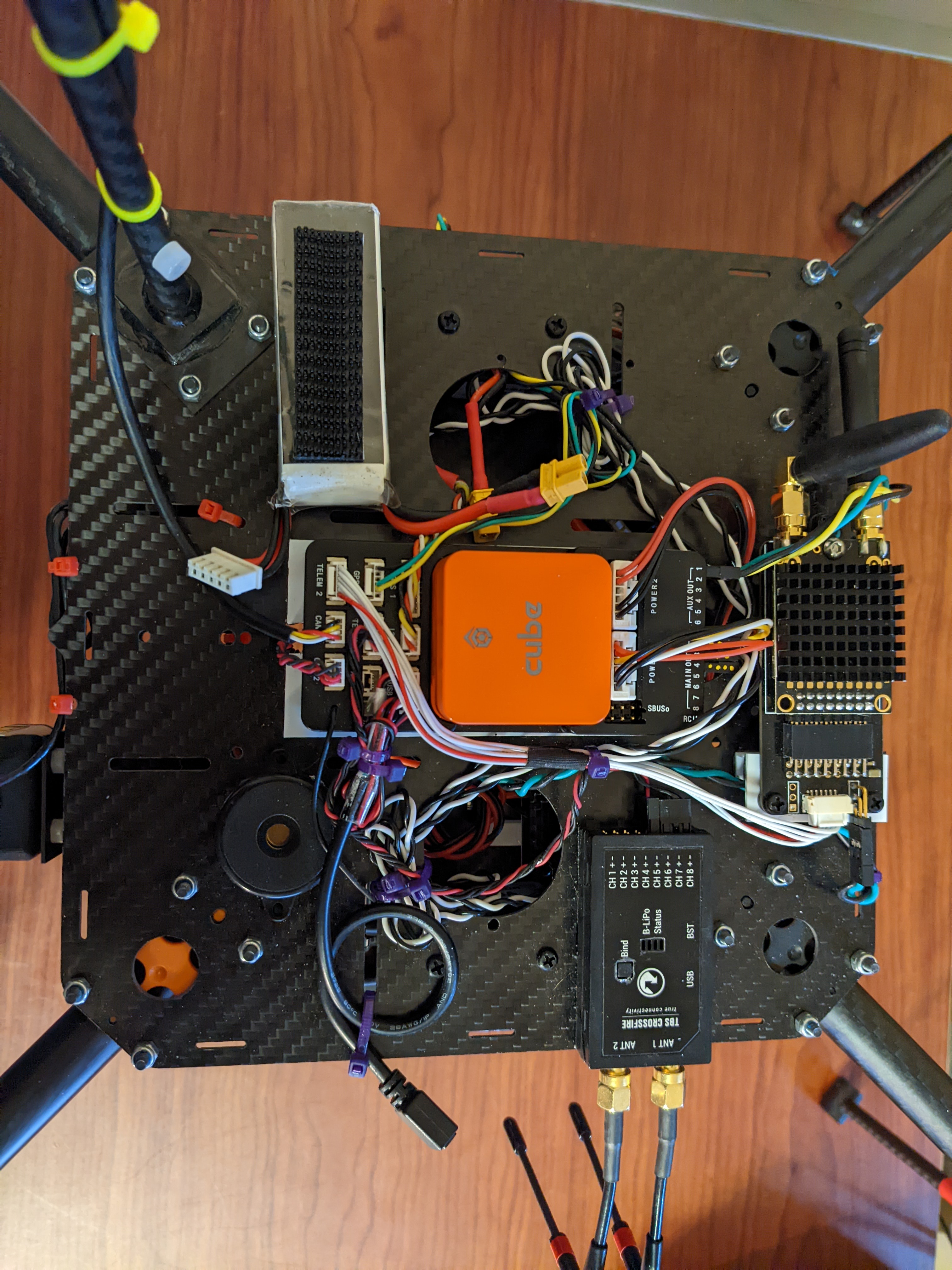
I haven’t heard reports of Cube Orange IMU failures - nor do I know how possible such a failure might be. But if it’s possible that hardware problems with my Orange Cube caused my problem, CubePilot might benefit as well from troubleshooting this.
Background - about 3 weeks ago after installing a new mast for my Here3, I attempted to re-calibrate my compass in flight using COMPASS_LEARN=4. After several minutes of hovering in altitude-hold for the calibration, the copter stopped responding normally and landed rough - breaking props.
Yesterday, after making repairs, I attempted another series of three test flights. I’d also updated ArduCopter to the new stable release.
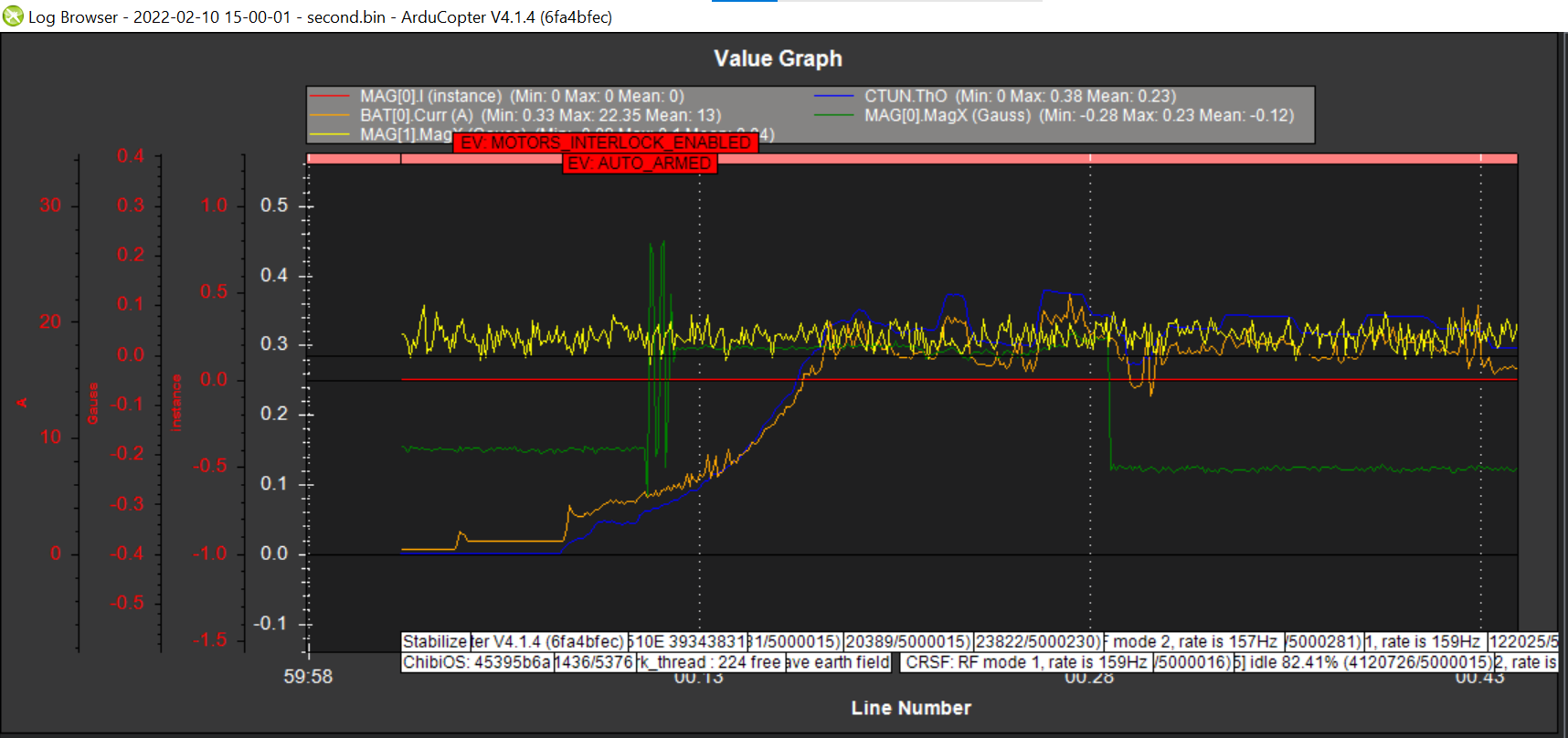
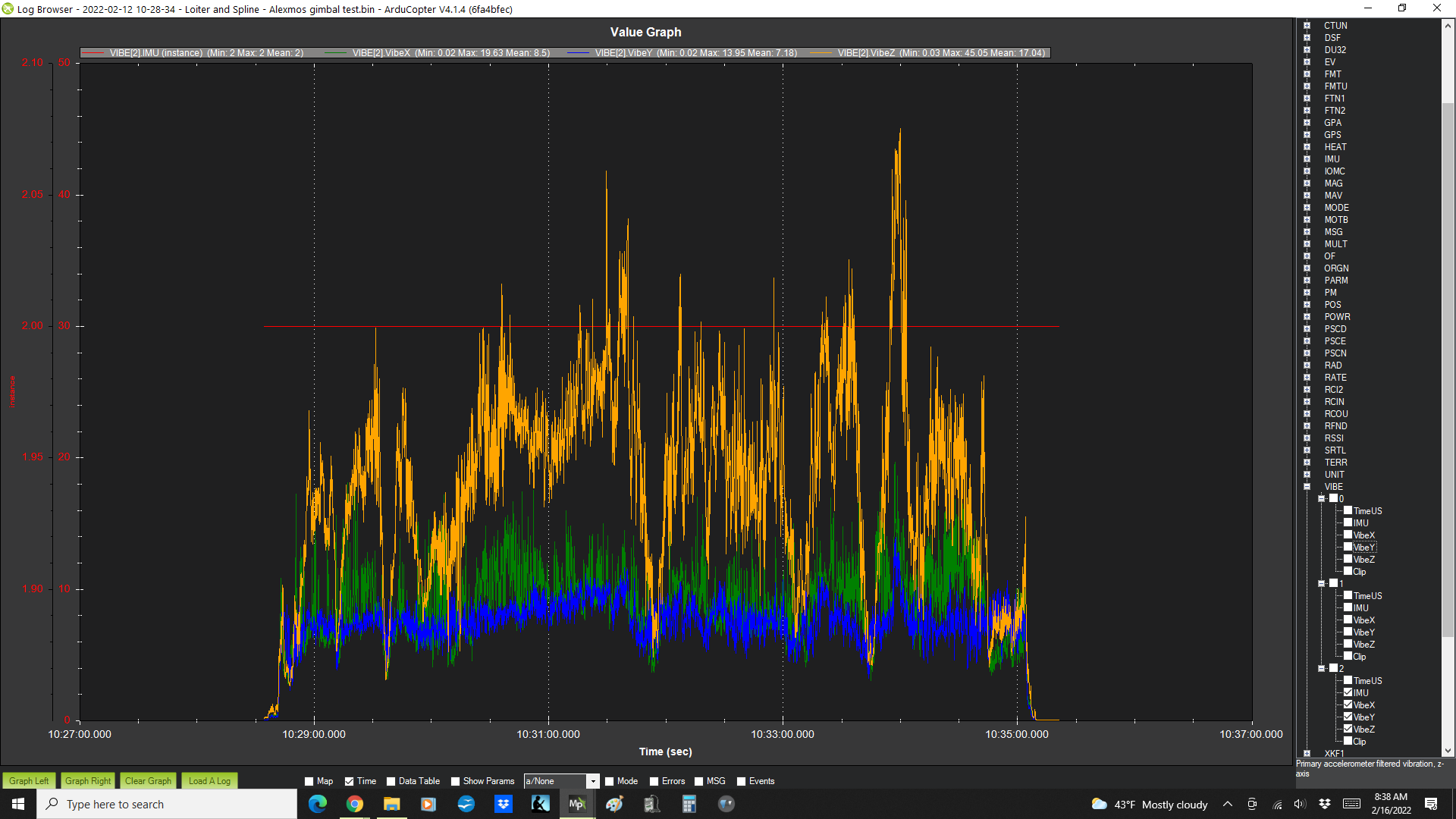
The first two flights ended unsuccessfully, again do to control problems. Fortunately, landing safely. Mavlink messages reported on my YAAPU display indicated problems with EKF3 and at least one of the IMU’s.
I then did a manual compass calibration on the ground.
The third flight, after the manual compass calibration, was successful - about 5 minutes in LOITER, including a landing.
I can’t tell if I had possibly made a configuration error, if there is a bug in ArduCopter regarding inflight compass calibration, or if there might have been an intermittent hardware problem with the IMU in my Orange Cube.
I’ve uploaded the BIN files from these three test flights. I’d greatly appreciate it if anyone more experienced and knowledgeable than me might take a look and offer any suggestions.
BIN file from flight number one:
BIN file from flight number two:
BIN file from flight number three: