I’ve learned that Copter 4.1 brought some changes in how ArduPilot handles IMU heaters.
For example - there are new parameter changes - and a new parameter: BRD_HEAT_LOWMGN
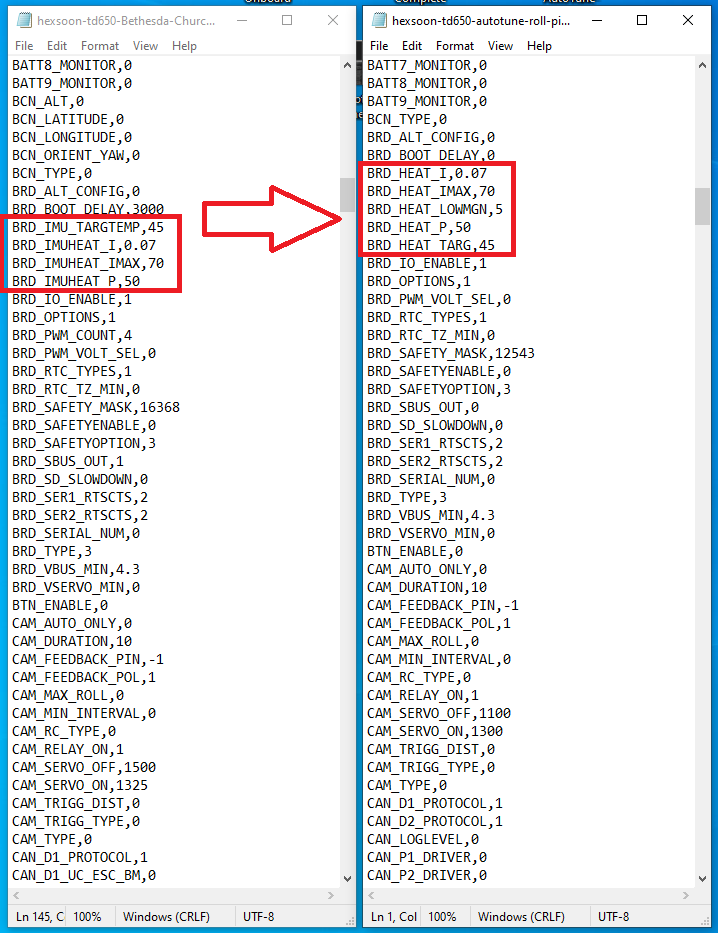
The CubePilot wiki for the cube states that best IMU performance is at 60C. But because it can take up to 10 minutes to achieve this temp, the default is a lower value. There must be a typo - the wiki states the lower value as 60C. But the ArduCopter default is 45C.
The new parameter BRD_HEAT_LOWMGN allows clearing pre-arm checks some number of degrees earlier than the target temp is achieved. The default value is 5.
My question is how much does IMU output change raising from 40C to 60C? What would happen if the target temp was set to 60C for optimal performance, and the margin was set to 20 so that the ArduCopter pre-arm checks would clear at 40C?