Hi
I have an IMU3 failure in a Black Cube.

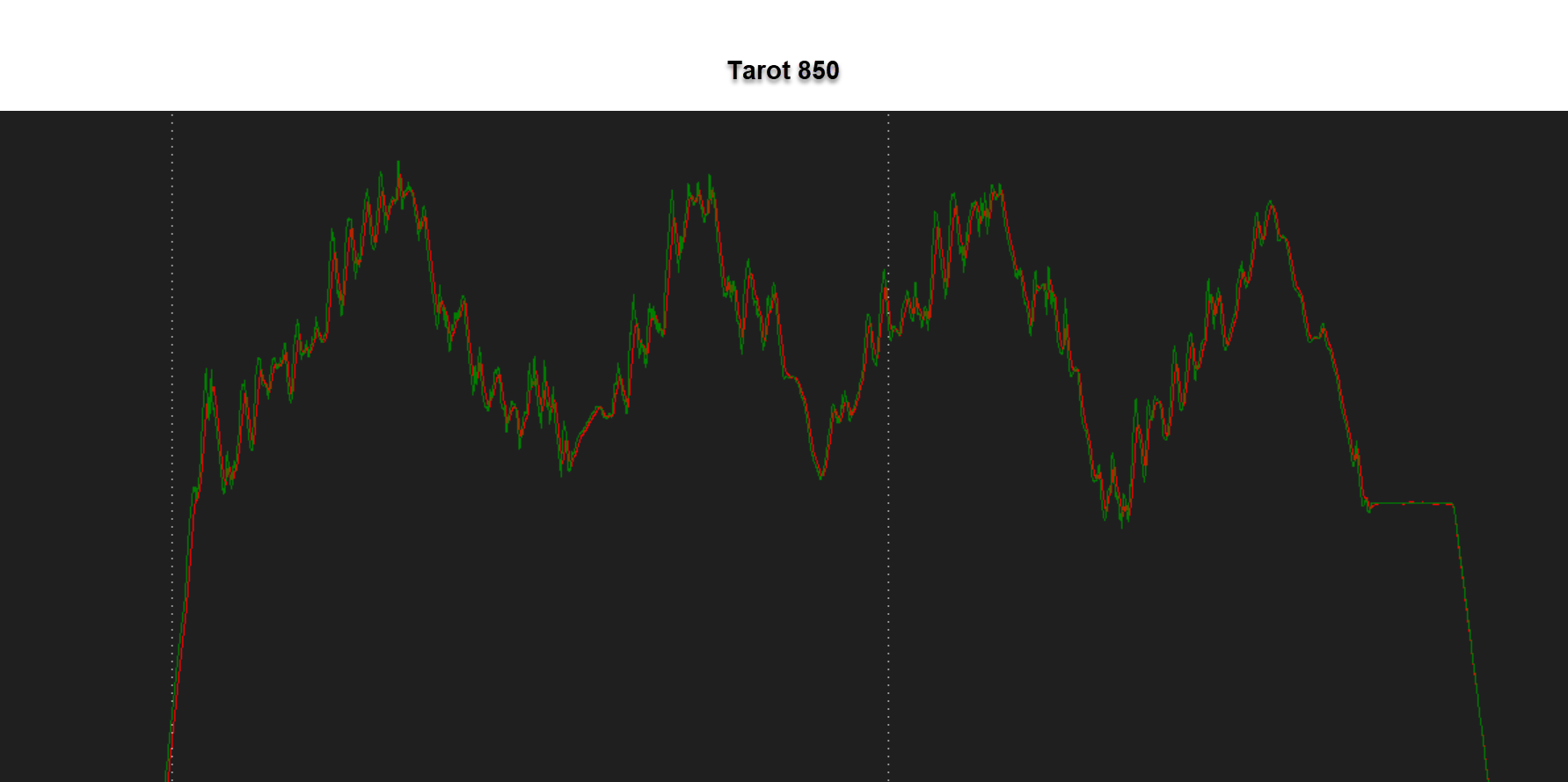
It seems it was causing this erratic zig-zag pattern when climbing and descending altitude. The lines should be smooth?
I understand you can disable IMU3 by doing this?
• INS_ENABLE_MASK = 3 This makes Copter only detect the first 2 IMUs.
• INS_USE3 = 0 This tells the attitude control system to not use the third IMU (if detected).
• EK2_IMU_MASK = 3 (or EK3_IMU_MASK). This tells the EKF estimator to only use the first 2 IMUs.
If I recall correctly they went to the moon with one INS system so a drone with two IMUs should be OK?
Any help or recommendations would be appreciated!