I have been flying my heli (pixhawk 2 Cube) for a while but recently I started getting “inconsistent accel” error message. I recalibrated the accel and tested it several times on the bench and all is good but as soon as my first flight the error message comes back. Did this several time with the same exact results.
Does this mean my Cube needs to be replaced.
I checked the Accel values on MP and they show as;
seems like ay3 value is way off. does this mean accel3 is no good.
It can’t be temperature related as I get the same error message indoors. I have also set all related parameters to SB02 recommendation and have the latest Arducopter version 3.6.11.
I would greatly appreciate your help and recommendation.
Unfortunately I have erased the last logs but as soon as the weather gets better here, I will go to the field and have a test flight and post the logs.
You can probably just record a short disarmed log by setting LOG_DISARMED = 1 for a few minutes. If IMU 3 is glitching, it will show up in the log without having to fly.
Thank you for your suggestion. I thought it might help to include a flight log as well. But I needed to make the change to LOG_Disarmed = 1 to get the second log. TX
Phil,
The first flight log is just after recalibration were I don’t get the pre arm error message and the second log is just after the first flight and when I start getting the error message.
What I forgot to mention is that, if I attempt to recalibrate with MP just after I start getting the Accel error message the recalibration fails in second step (tilt vehicle to the right). I have to wait for several hours or a day to attempt again, for a successful recalibration.
Oops, i didn’t check before uploading but looks like the first data log file is no good.
I don’t understand why system didn’t record any data for the 5 minute flight.
The second data file log seems all right.
Please let me know if you need a log for when I don’t get the error message.
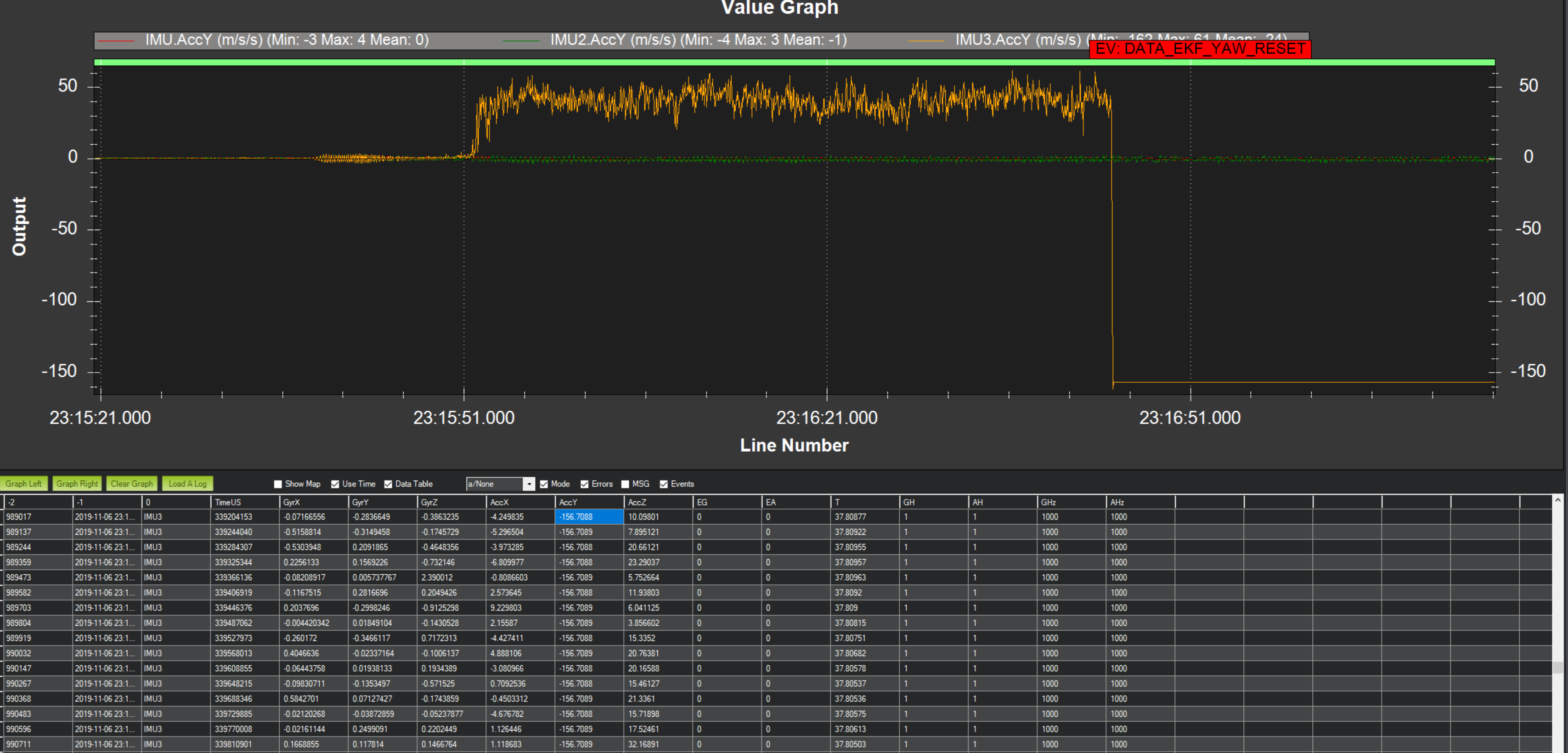
It’s okay at first, but it quickly goes up to +50 G’s m/s^2, and then completely cuts out and sends a constant value of -156. Hard to say why it’s crapping out.
You can either replace the Cube, or just turn off IMU3 by setting these params:
INS_ENABLE_MASK = 3 This makes Copter only detect the first 2 IMUs. INS_USE3 = 0 This tells the attitude control system to not use the third IMU (if detected). EK2_IMU_MASK = 3 (or EK3_IMU_MASK). This tells the EKF estimator to only use the first 2 IMUs.
Thank you so much for the detail instruction on how to disable the IMU3. I have a lot of expensive equipment on the heli and now that we know my Cube is not well, I think it is best to RMA it, as Phil recommended.
Thank you both for taking the time and looking at the logs, much appreciated.