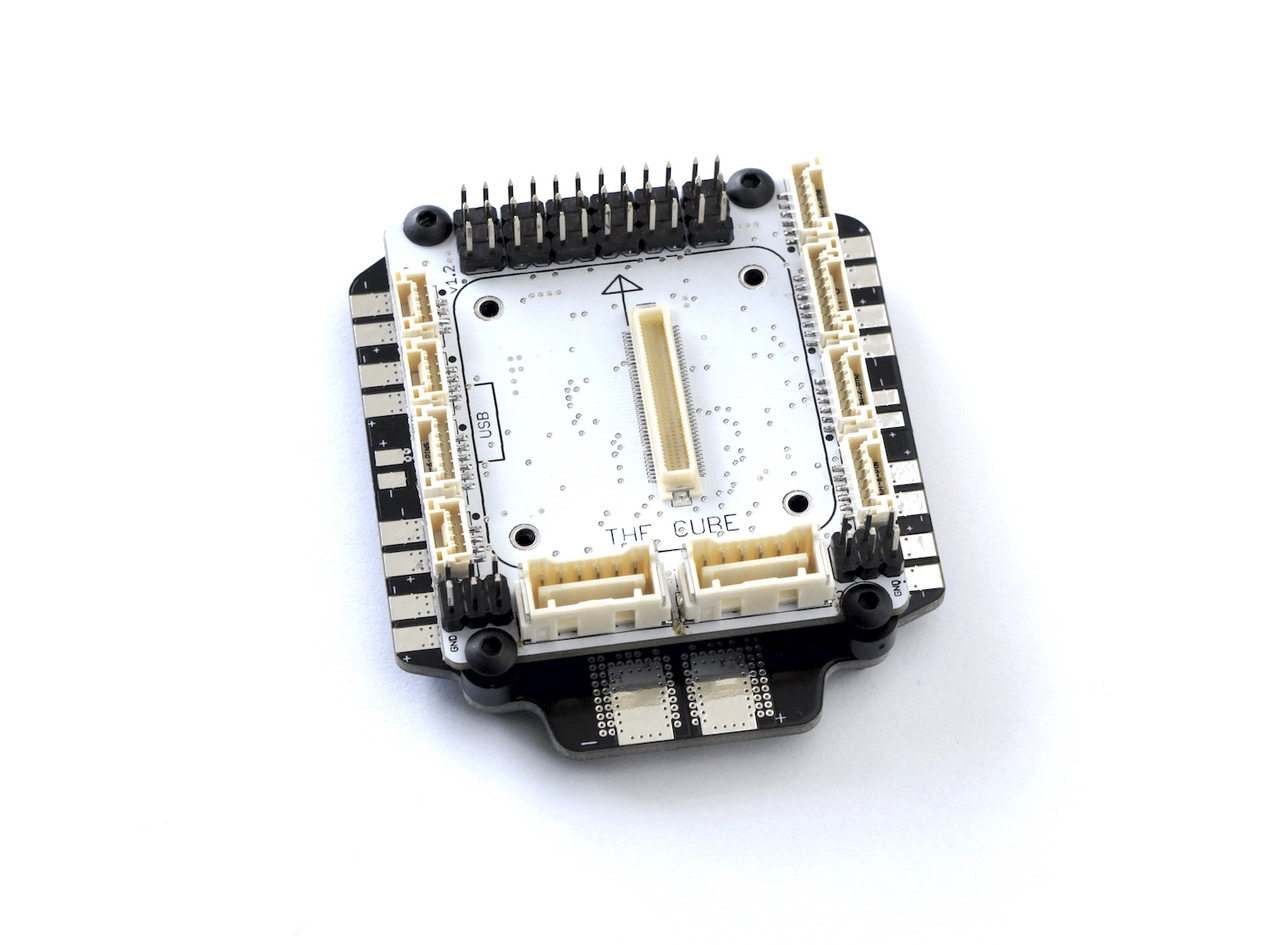
I’m happy to introduce our new PCB boards, dedicated to the use of the world most famous autopilot : the Cube!
We took over the functionalities of the first BETA version of our mini carrier board and made the following changes: adding SERIAL 5 connector pattern (on bottom) and adding solder shunts to allow user selecting the RC input (PPM-S.BUS/Specktrum) and RC voltage (3v3, 5v).
The Mini carrier board now comes with a Mini PDB, that would help to keep the drone assembly as clean and compact as possible. The Mini PDB can drive up to 180A.
You can find more details on the user manual (bottom of product page)
I have a question about this carrier board and was hoping someone on this thread could help me.
I have this setup with a Black Cube as well as a ESP8266 Breakout Board (for WiFi connection) feeding into Telem1 port. Have also fed into Telem2 port.
I have flashed the ESP8266 WiFi board with the proper firmware for it to communicate through QGC mobile or Mission Planner (ESP8266 wifi telemetry — Copter documentation) but after multiple power cycles and even swapping the RX and TX connections to double check they were fed in correctly, I still can’t get any parameter download, the baud rate is set at 921600 both on the Cube Black and the ESP8266 (using NodeMCU Flasher).
My laptop and phone can connect to the WiFi connection but it doesn’t seem to be connecting with the actual drone… as in no data is coming through the pipeline
Thoughts? Thx in advance for your expertise