Hi everyone
@Thomas
I have just try my quad with the IR-LOCK Precision Landing, and works prety nice. Any way, I would like to improve more the landing, because sometimes it miss for 20cm aprox.
Here is the telemetry
Here are some videos
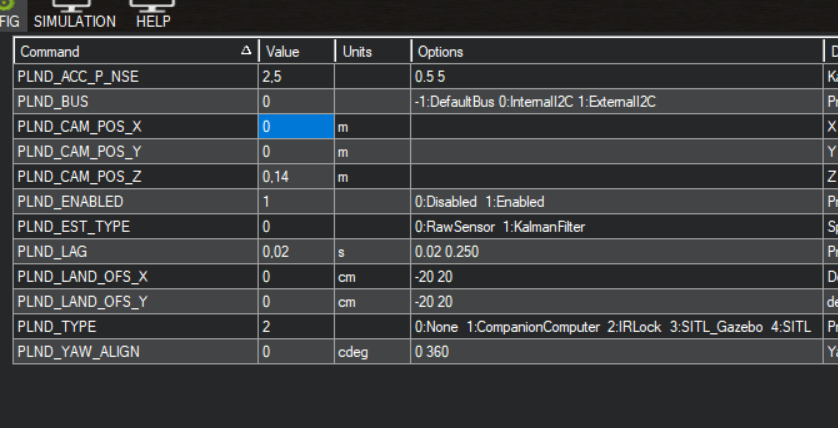
Here is my PLND setup
Some question
-
How can I manage the speed when the drone Acquired the beacon? When the drone is not over the sensor, it turn very fast to put the drone over the sensor
-
Can the precision landing work with the RTL?
-
How low can the camera be installed? Right know it only has 4cm from the ground. This question its because i think the more near to the sensor, more dificult to see it if the drone moves from the center.