My build is a big coaxial octocopter (26 inches folding prop) running a Blue Cube (hard mounted) with 3.6.7 copter version. Its vibration behavior degrades significantly whenever there is high level of wind and gusts (>20 km/h). I will give you an example of three repetitions of the same auto mission, with three different wind/gust levels.
As you can see, the same copter can have between 0 clip with no wind up to 1600 clips in a severe wind scenario.
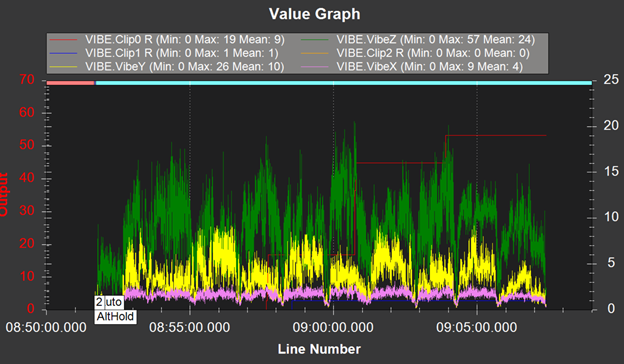
Case 1 (low wind, clip upt to 20)
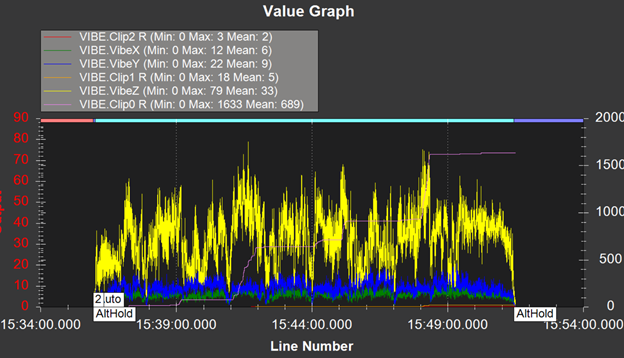
Case 2 (extreme wind, clip upt to 1500)
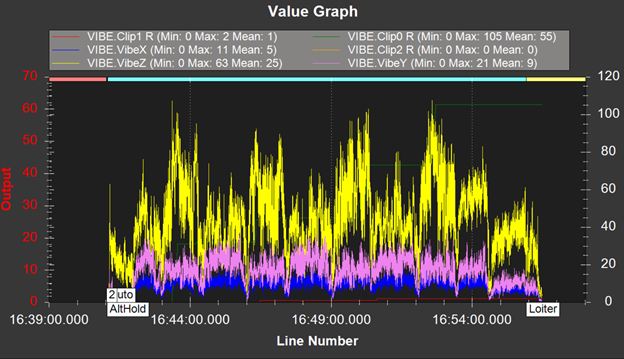
Case 3 (moderate wind, clip up to 100)
I would like to think that the copter is able to handle those situations in spite of the vibration levels (in fact it did, it completed the mission the three times with no problem). But this is something that I would like to confirm with expert voices. Do you think that it is safe to keep flying like this, knowing that sometimes when there is wind I can get up to 1600 clips 0?
I have EK2_IMU_MASK set to 7 following an advice from this forum, thinking that if something bad happen with IMU1 and IMU2 due to the vibration, IMU3 would come to the rescue. Is that…. let say… true? Can I sleep well with the previous statement?
It is nice to hear that the dynamic notch filter is around the corner. However, if I understand it correctly, that is not a solution when you have clipping, since this is the actual imu hitting its upper limit, 16g, something that cannot be removed vía software. Am I right?
It’s a loop. FC is driving motors to correct for disturbances in attitude in frequency bands where your particular build is… let’s say vulnerable. And that’s why Andyp1pier says ESC telemetry works best, because you can filter by knowing actual motor RPM and accounting for it, not by estimating it from accelerometer noise created by airflow hitting frame as a prop swings by.
Your clipping will disappear as the FC gets wiser.
Wow, is it not dangerous? Leting the FC to drive the motors trying to avoid certain “vulnerable” frequencies instead of maintaining altitude or attitude? I dont know if I am getting right this dynamic notch filter… I thought that it was simply removing certain frequencies dynamically but by “software” at the end…