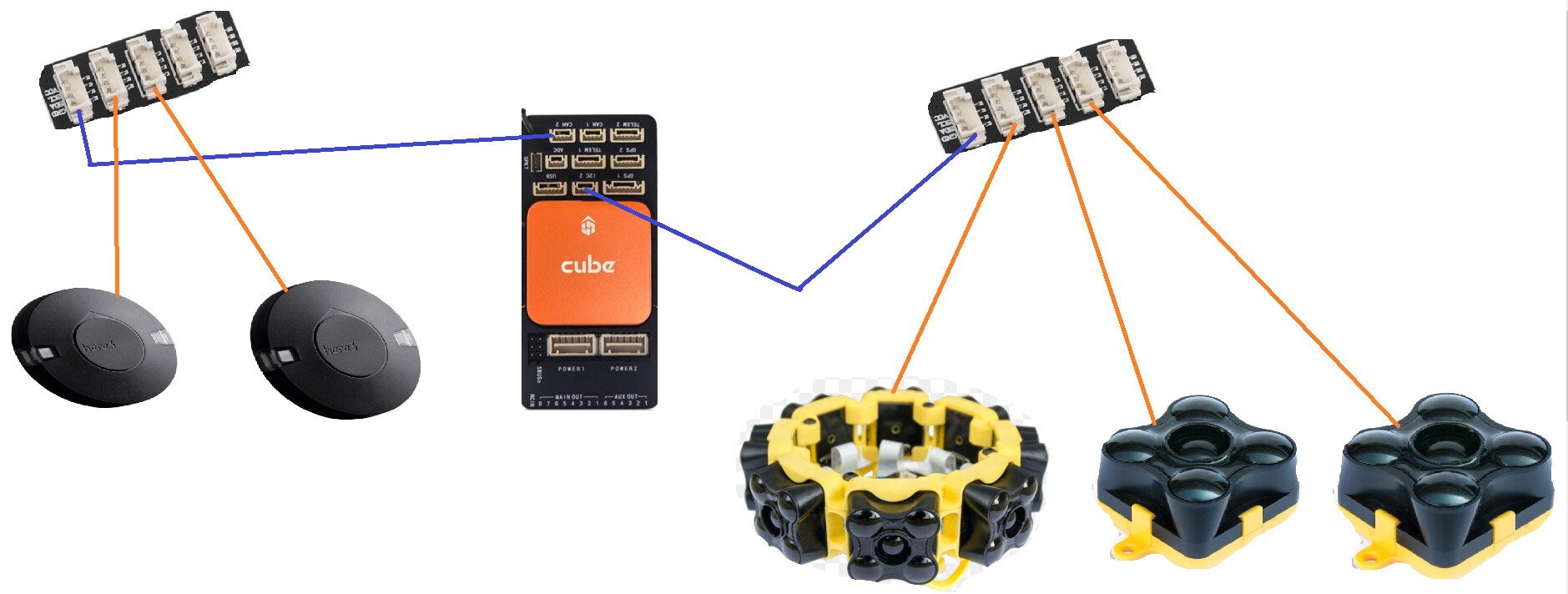
Is this connection possible ? Here I have used a I2C splitter and connected one teraranger evo 60m tower (lidar 360), evo 60m (bottom) and evo 60m (top). All these are connected to one I2C 2 port of cube orange using the I2C splitter. And two here 3 GPS connected to the CAN 2 port of cube orange using can splitter ( basically the same I2C splitter as connections are same ) Below there is a diagram to show whether am I correct or no. Please suggest if there are any mistakes with the connections or whether is it possible or not. @Alvin
And @Alvin If connected to I2C 2 port then no need to set up anything ? Like setup lidar 360, rangefinder, etc as a serialx protocol? As much I know I2C 2 is not serial. So I2C automatically scans the ports. The thing is that my I2C 2 splitter should be powered before the cube orange gets powers so that it can scan. I read it somewhere. But the thing is how the I2C 2 will know that there is a tower evo
(lidar 360), evo 60m (bottom rangefinder) and evo 60m (top rangefinder)? Like if I would have connected to GPS ports or any serial ports, then I can configure but n I2C how ?