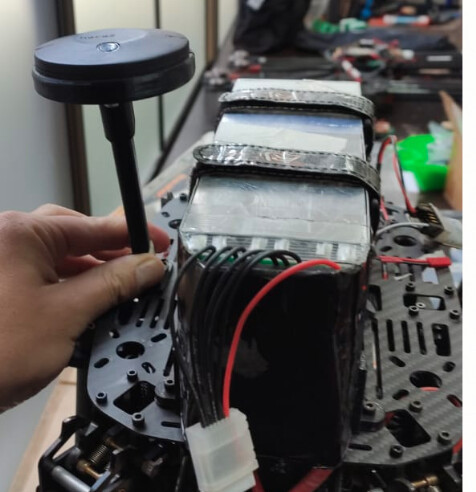
I have been reading some people have reported the Li - Ion Battery could generate some electrogmagnetic issues. Im ussing the Li-Ion Diamond foxtech baterry, and in fact is installed on the right of GPS. here is a picture
Usually the battery itself won’t cause interference but the power wires coming out from it. If wire is close to the gps module it can cause large interference.
You may try to elevate your GPS module at least 10cm from high power devices.
There is still the original FFT graphing functions in MissionPlanner, but these days I use the web based tool: ArduPilot Filter Review Tool
You need at least these parameters set to gather the data, and in fact they can stay set because they dont cause additional load or log file size to any noticeable extent.
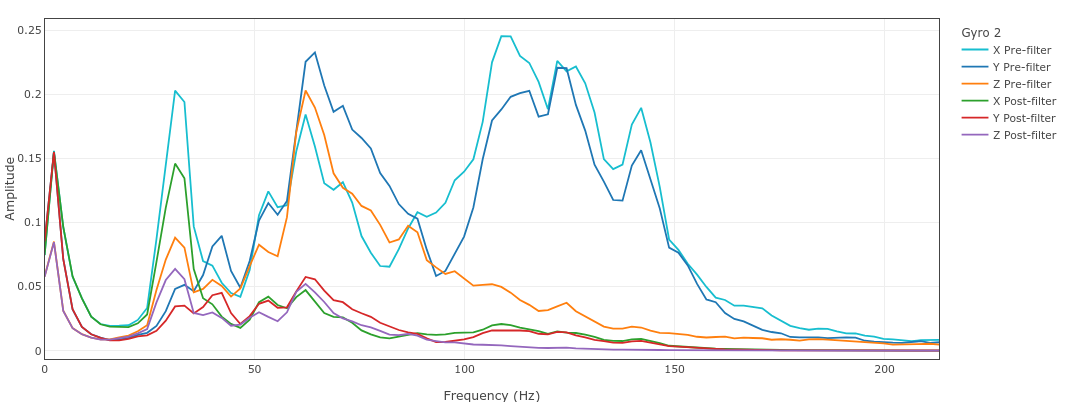
I wouldnt be rushing to set the notch filter values yet, I feel this is not representative because the copter is not hovering at any stage and seems like either it’s unstable or you cant control it properly for some reason.
Set this so there is useful data in the log: LOG_BITMASK,180222 I suggest you start your own thread about getting this copter configured properly and flying, since this is quite an old thread about something completely different.
Include information about what battery, motors, props and ESCs you have.
yeah sir , i know this is not a proper hovering log , i just want to know to select the INS_HNTCH_REF value , so the value 1st peak value should be selected right ?so bymeans of this log the INS_HNTCH_REF =31 and the INS_HNTCH_BW =15.5???
These are the values you would use as a starting point
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,15
INS_HNTCH_FREQ,31
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.21
INS_HNTCH_OPTS,0
It’s better to keep the bandwidth as narrow as possible and still do the job. A wider bandwidth introduces some lag in attitude control.
INS_ACCEL_FILTER can be in the range 10 to 20 typically, and the default value is now 10.
We developed a formula for INS_GYRO_FILTER based on prop size (thanks to Leonard Hall) and the MissionPlanner Initial Parameters calculator will set it and a number of related parameters for you.
The “nuts and bolts” are in the spreadsheet, which was the basis of the MP Initial Parameters, and there’s some history over on the Ardupilot forum if you really want to go digging.
Download a copy, dont try to use it online. https://www.dropbox.com/s/w2ru1gmk7h7ga7m/Initial%20parameters.xlsx?dl=0