So here is the rundown. Currently in the process of tuning a large/heavy hex. I have gone through the steps on mission planner for setup and first flight ect. I’m at the point of notch filtering & PID Tuning. In Altitude Hold the drone is very stable and smooth (no oscillations to speak of). Now in Loiter I’m getting a bit of a pendulum effect. Which I am to believe that it is caused by low PID’s (slow adjustments) I have uploaded the flight logs for the ALTHD flight also the LOITER flight to see what can be adjusted to help prevent/ mitigate this this slow response. I have had great success in the past with smaller quads that are more agile. But this big hex is stretching my technical knowledge a bit. For clarification here is a breakdown of the full build.
HEX 1600mm motor center to center
T-Motor U10II 100KV
Alpha 60v 6-12s ESCs
T-Motor 30.2x9.9 folding carbon props
Here3 gps (dual)
Herelink Blue & Blue Airunit
Cube Orange+ on ADSB Carrier
Mauch PC4/V3 w/PL-Sensor
17000mah Max Amps 10s 15c 629wh battery
full carbon fiber construction frame (very ridged)
min_TOW 13.8kg
max_TOW 19kg
ATL HOLD FLIGHT
(.bin file)
(video)
LOITER FLIGHT
(.bin file)
(video)
DRONE IMAGES
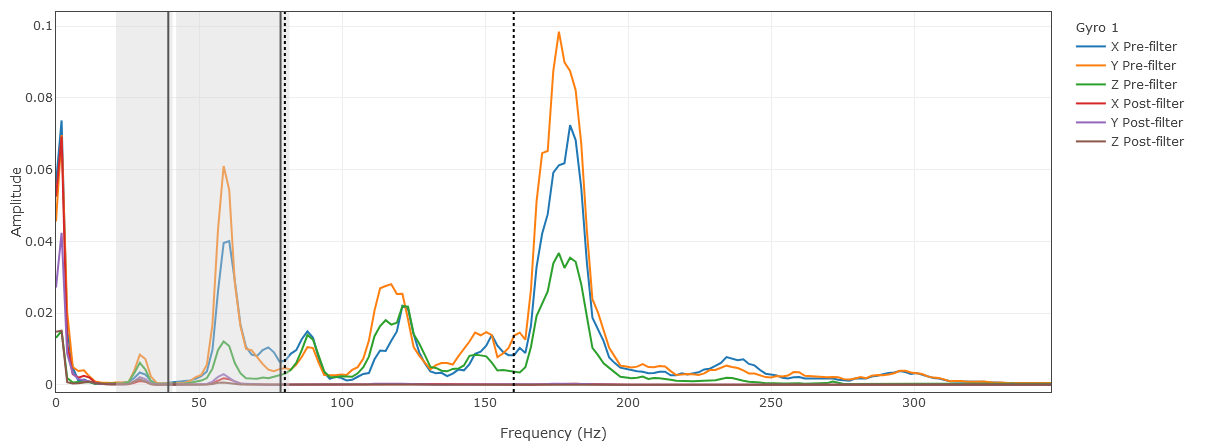
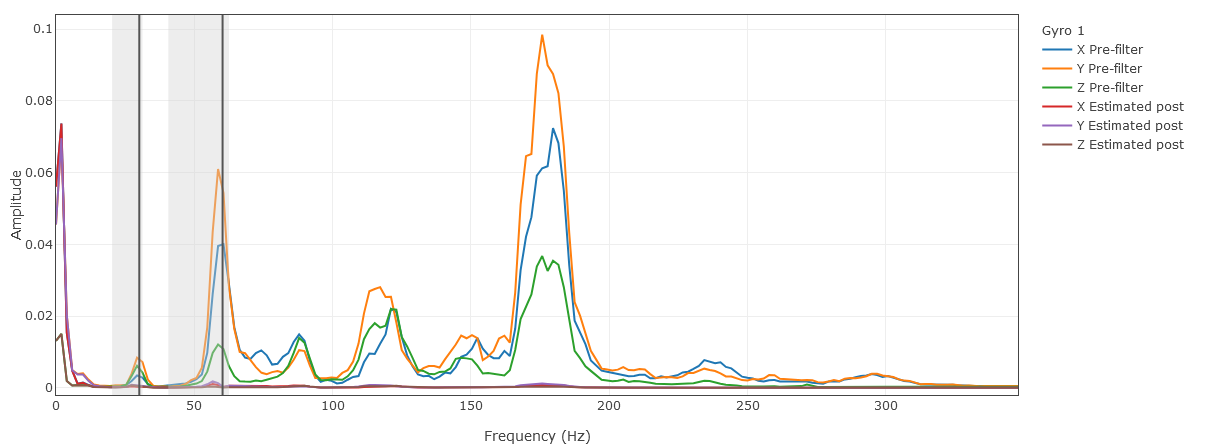
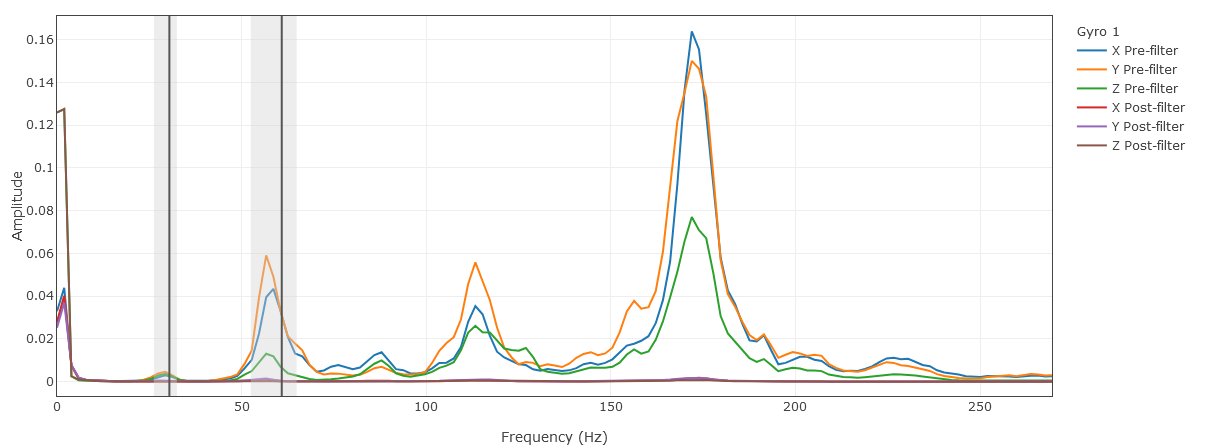
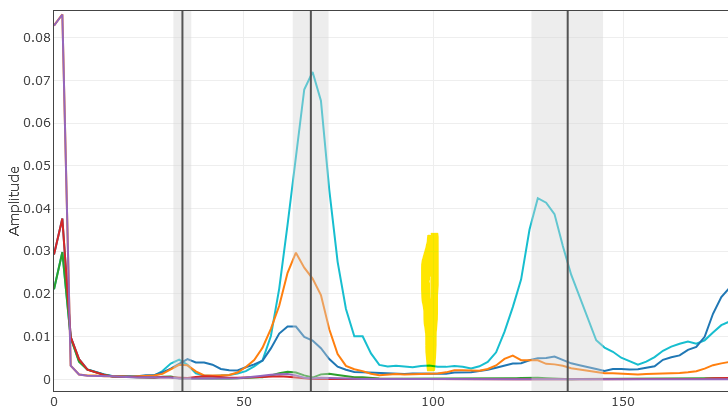
Any input or review of this is greatly appreciated. Don’t really want to test durability through crashing it. The next flight (weather permitting) will be with (FFT) on and ALT HOLD to verify if I’m getting and vibrations that need to be tuned out via “notch filter”
I know this is a lot of info dump, but I would rather be accurate than vague. Thanks again for the help.
")