Param and Log.zip (2.2 MB) Hello,
I have just completed first flight of a new vehicle I built.
T motor MN1010KV90
Alpha 80
Orange Cube
34" props
Firmware 4.1.3
I flashed existing parameters to the vehicle based on a similar one a friend of mine built.
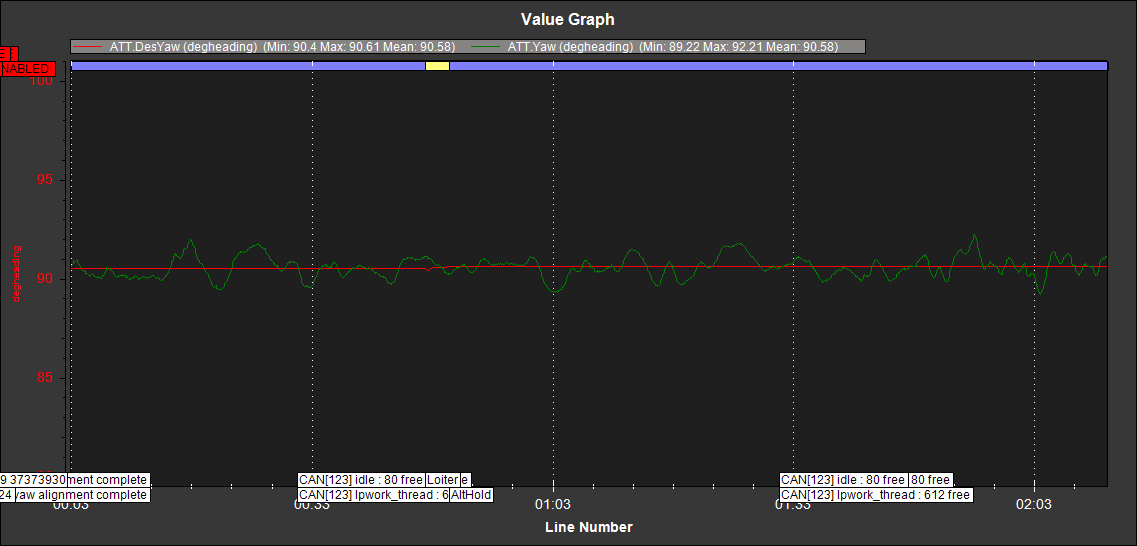
Took off just fine with the yaw a little wonky. All in stabilize.
Alt-hold worked good, no real behavioral changes.
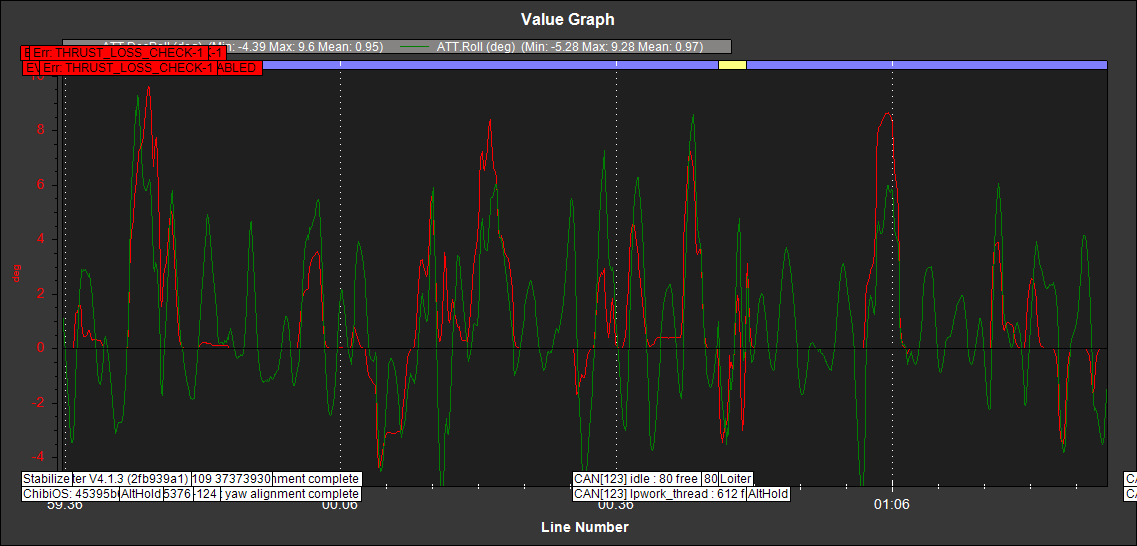
Switching to loiter, the vehicle immediately started to oscillate.
I know enough to be dangerous but tentative with the size of the vehicle.
Would love some feedback based on the log…
Thanks to all who chime in.