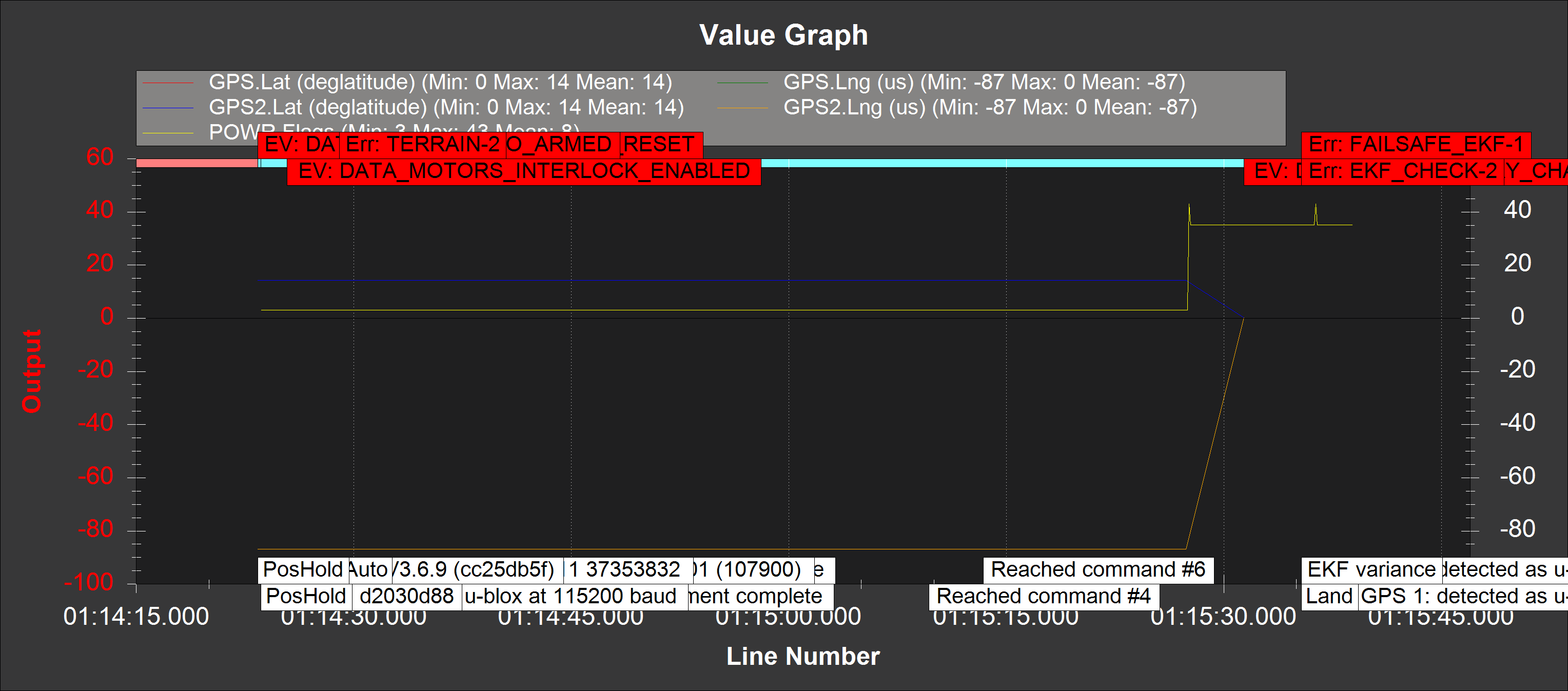
Power issue confirmed. VCC power flags indicate peripheral overcurrent at the exact moment the GPS dies:
I read through this thread with similar issues: [Solved] Peripheral power / brownout / bootloader / PSM - #28 by Anubis
However, we are running on 3.6.9 with ChibiOS and still having the issue. Is it possible that 2 GPSs is simply too much power? The inconsistency is still really strange. The entire fleet is operating with the same configuration and only these 2 drones are seeing this problem.
Here is our full Cube port configuration:
Power1 - Mauch HYB-BEC
Power2 - Mauch Backup HYB-BEC
Servo Rail - Powered independently by another Mauch BEC (5.3V)
GPS1 - HERE2 (I2C)
GPS2 - HERE2 (I2C)
Telem1 - RFD900+
Telem2 - LiDAR (only data lines, powered through servo rail)
USB (the JST-GH port) - buzzer
Serial5/Cons - LiDAR2 (only data lines, powered through servo rail)
I2C - flow sensor (only data lines, powered through servo rail)
Since the RFD is on it’s own dedicated rail, the only 2 things sharing the 2nd peripheral rail are the GPSs. Is it really possible for just these 2 things to overdraw the 800mA limit?