Hi,
Can anybody help me fulfill my drone requirements ? @Alvin @MadRC @philip @kellyschrock
Note :- In herelink, I will be using solex tx as my default app. This will be my all time preferred app in
Herelink.
These are my requirements :-
-
Obstacle avoidance with all directions including front, back, left, right, up, down. I actually need very accurate obstacle avoidance with long distance sensing. I mean that the sensor which will sense the object should be enough to detect the obstacles from a bit far as it will be safe for my drone. Here I also need that when I RTL my drone, now see suppose I am flying in a curve or zig-zag path, in a normal RTL, it will be returning as same manner in zig-zag or curve as I flown earlier but here my requirement is that when I issue RTL in my drone, then the drone should return to home by clearing the unnecessary curves and zig-zag. Here I mean that mapping. The drone should clear the unnecessary paths and return back home with avoiding the obstacles such as buildings, tress, poles, etc. Even when my transmitter goes out of my range, then also the drone should return back by RTL with clearing the unnecessary paths and with obstacle avoidance activated as if my battery will be low and if the drone issues regular RTL without clearing the unnecessary paths then the drone might crash will RTL because no enough fuel in the battery. The obstacle avoidance should also work with manual mode in my herelink and also in other modes too. Like in AUTO, Guided, etc. It should also work when I map something in my herelink solex tx to complete a mission and in my mapping there is some building involved in the path of the map, so it should avoid that thing too by recognising the building and planning itself the route and complete the mission safely. Here I was talking about the Auto mode. The obstacle avoidance should also work in Guided mode and other mode such as manual, AltHold, Loiter, etc. I need that the drone is protected from all the directions. Not only the front, back, left, right but also the up and down of the quadcopter should be protected.
-
Terrain following
Another note :- I will be flying a bit aggressively with the drone so even if I give 100% command to the drone to move forward, still it should not move forward if there is a obstacle. These should apply in all directions. Even If I take off and above my drone if there is a obstacle, it should not move up even if I give command in my transmitter to throttle up.
-
In solex, will there be any update so that we can get good visuals like we get in DJI drones. Lile if the object is closer, so we can get some beep from the herelink and also the distance from which my drone is to the object. Such as in DJI you can hear the beeps if you approach closer to the objects and also see that the object is 0.5metre, 1metre, 2metre away from the drone? Any idea @kellyschrock Are the developers working on this as not only me but many asked for this feature in solex to be implemented. Today only I was reading one post in this forum to get visual details from lidar in the solex tx herelink. Again, this will be a very nice feature. I would request to add this feature in solex tx app. @kellyschrock
-
Follow me and any object. I need that in solex tx we will have a option to select a particular area
on the screen of the solex tx app to follow a specific object. Without even requiring the transmitter
to keep near us, suppose I want to follow a car so in the follow mode, which ever thing I select, it
should follow it. Suppose I select a red carin solex tx to follow so it should follow that. I will be
using a sony camera with a seagull #REC 2 so with the help of the camera it should be able to do
that within solex tx. If not in this above way, then is there any wat to at least keep the transmitter
with us and get follow me at initial stage in solex tx? @kellyschrock
some suggestions I need from you :-
Here my another thinking about using 360 degree lidar sensor is that, it turns using motor so will it be fast enough to capture all the 360 degree directions. I mean as I mentioned above that I need accuracy so if I use the 360 degree lidar that there may be a possibility that I will be flying in a higher speed and there will be a obstacle, then will the 360 degree lidar be able to measure that ? Because that is not constantly monitoring the articular degree like the front direction of the drone or back, left or right directions so will there be a possibility that there will be a delay in scanning all the directions using 360 degree lidar ? Should I look after teraranger or any other lidar so it will be constantly measuring all the directions with stable without moving ? The benefit may be that there will be no mistake that the obstacle is not detected and the drone might crash whereas may be in 360 degree lidar, the possibility are that they are not constant or fixes, they move in all directions so they might get wrong readings or may be due to higher speed in my drone, then could not sense a obstacle due to the high speed ? Am I correct ? Is my thinking correct ? @Alvin @philip @MadRC @kellyschrock Even in terabee official website it is mentioned that with zero moving parts, we can get more robustness. So it means that 360 degree lidar will not be actually perfect and robust?
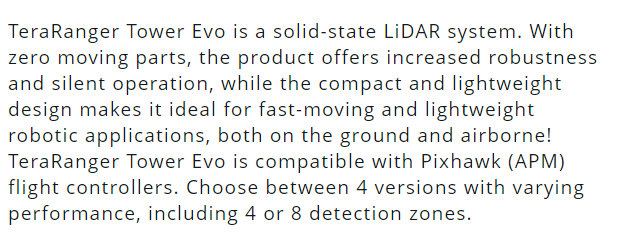
Can we compare a 360 degree lidar with a terabee tower with 8 lidars which will be stable ? Which will give more robustness and reliability ? 360 degree lidar or a fixed lidar such as terabee tower, etc lidars ?
Another question is that will terraranger be able to sense the obstacles in all directions. I mean that will there be any blind spots ? I am talking about this teraranger model specifically :- Link :- https://www.terabee.com/shop/lidar-tof-multi-directional-arrays/teraranger-tower-evo/
( specifically with the 8 sensors )
If there will be blind spots in terabee, will it affect my drone obstacle avoidance in any way ?
I actually read the docs from ardupilot but still a bit confused as in the docs they say that obstacle avoidance is for front, back, left and right but my questions which what about the down and up direction of the drone ? Please help me with it. I need obstacle avoidance, terrain following and herelink solex tx warning if obstacle comes near including beeps,etc. Any help would be really appreciated.
Thank you,
Regards,
Biswajeet Prusty
