I have a problem with the Mavlink connection from Alexmos SBGCv3.0 to Cube 2.1 Black this post would serve me as confirmation that The Cube can work with Alexmos via Mavlink (the documentation on the net is related to Pixhawk)
Obviously I did a search on the whole group but I didn’t find anything
While respecting the typical configuration (TX BGC to pin 3 Telem1 PixHawk and RX BGX to Pin 2 Telem1 PixHawk … as well as from GND to GND), when I insert the connector on BGC the GUI 2.70b0 freezes and does not load the parameters. If I remove the connector, it recharges regularly.
I also replaced the SiliconLabs CP210x driver updated to 2020 but with no effect
I think it is because of a single serial that has to manage everything then or manage the GUI part or the Mavlink part … however I don’t understand how the Basecam manual advises to check the AHRS, GPS, RC etc. parameters without a USB backbone with PC
Obviously the parameters on the Cube 2.1 Black are set according to the manual (serial1 = 115 - Protocol = 1 etc.)
It is logical that if I reverse RX-TX the GUI loads and communicates via USB but certainly not with the FC
On MP I have no effect so I also try to point the camera from the Map but without effect
Also … on RC Setting of the GUI Alexmos, Roll, Pitch and YAw must be set with API_VIRT_CHx ??
HI, we use this setup a lot and works just fine.
Please note though, If you are using UART1 on the SBGC it is the same UART as the USB connector the GUI uses. For best result, if you have an extended board, use UART2 which is on the underside of the board and shares a connector with the encoders.
Otherwise, use the RC input as UART2.
Hope this helps.
Hi Antony, thank you very much for your availability and description.
Now I try to work on it and I can tell you if everything is working correctly.
However I’m afraid I have V3.0 (not extended) and so if I’m not mistaken it should only have 1 UART which is the one shared with the USB
Now everything starts to be clearer
However, regardless of the USB problem, if SBGC is set regularly and the parameters on the FC are also correct, it should work; unfortunately the only way, if I have not misinterpreted it, to test its operation would be sufficient to use the right button on the MP home page and choose “point the camera here” but even this does not work.
thanks to your indications, I can say that it works now and I thank you. Sometimes it takes a divine hand to get out of the mud
I don’t have full control yet in the sense that it now works on Mavlink but as I have V3.0 (not advanced) I have had to use Aux 3 as the RX port from the FC (on Uart2)
Some things I still don’t understand:
the gimbal was perfectly stabilized in PWM; now I have to do the calibration again? Logically, it should take the calibration from the FC … right?
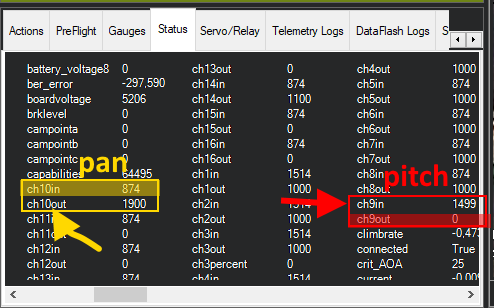
I manage the pitch well but not the yaw … probably because the pitch comes out of channel 9 but the Pan is on channel 10 and with Herelink I can’t manage the input in the sense that on MP I don’t see an active value on CH10 (always 874 by default) … I have to study
how can I tell Alexmos to automatically manage Roll and Pan? Pitch is controlled by the wheel
Thanks Anthony … I hope you can give me some more help on these 3 issues …
It does not take the calibration from the flight controller, but it does use AHRS data from the FC. I can only presume this has perhaps knocked off your PIDs as it has more precise data to use,
I dont know the Hearlink, so don’t know how the channels are mapped out,but if there is no channel activity in MP then it suggests it is not active.
This depends on what you mean by automatically? there are 3 options here.
a. the FC controls the gimbal, i.e. in a mission
b. you control manually, via the FC
c. Follow mode, this allows the pan and / or roll, to follow the aircraft’s attitude nice and smoothly after a set degree of offset.
hi Anthony … thank you very late due to my work that takes me far from my passions …
Basically the system works on Pitch but not on Pan. And the reason is that Herelink works with channel 9 (Pitch) on ch9in (variable wheel from 874 to 2057 and mid point at 1499) while channel 10 (Pan) works only in ch10out and I can’t figure out how to make it work in ch10in
So the problem seems to be that on channel 9 I move IN while on channel 10 I move OUT when I should command IN
I don’t know if it’s a Herelink prerogative but on Solex I set channel 10 as Non-Latch Servo
ch9out = 0 is a strange value.
Can you check the parameters for RC10_OPTION and RC9_OPTION they should both be 0
Looks as if it may be set to something like cam trig 9.
You could also go to setup >> optional >> Camera Gimbal and make sure Tilt, Roll Pan are all blank.
and the shutter is Disable.