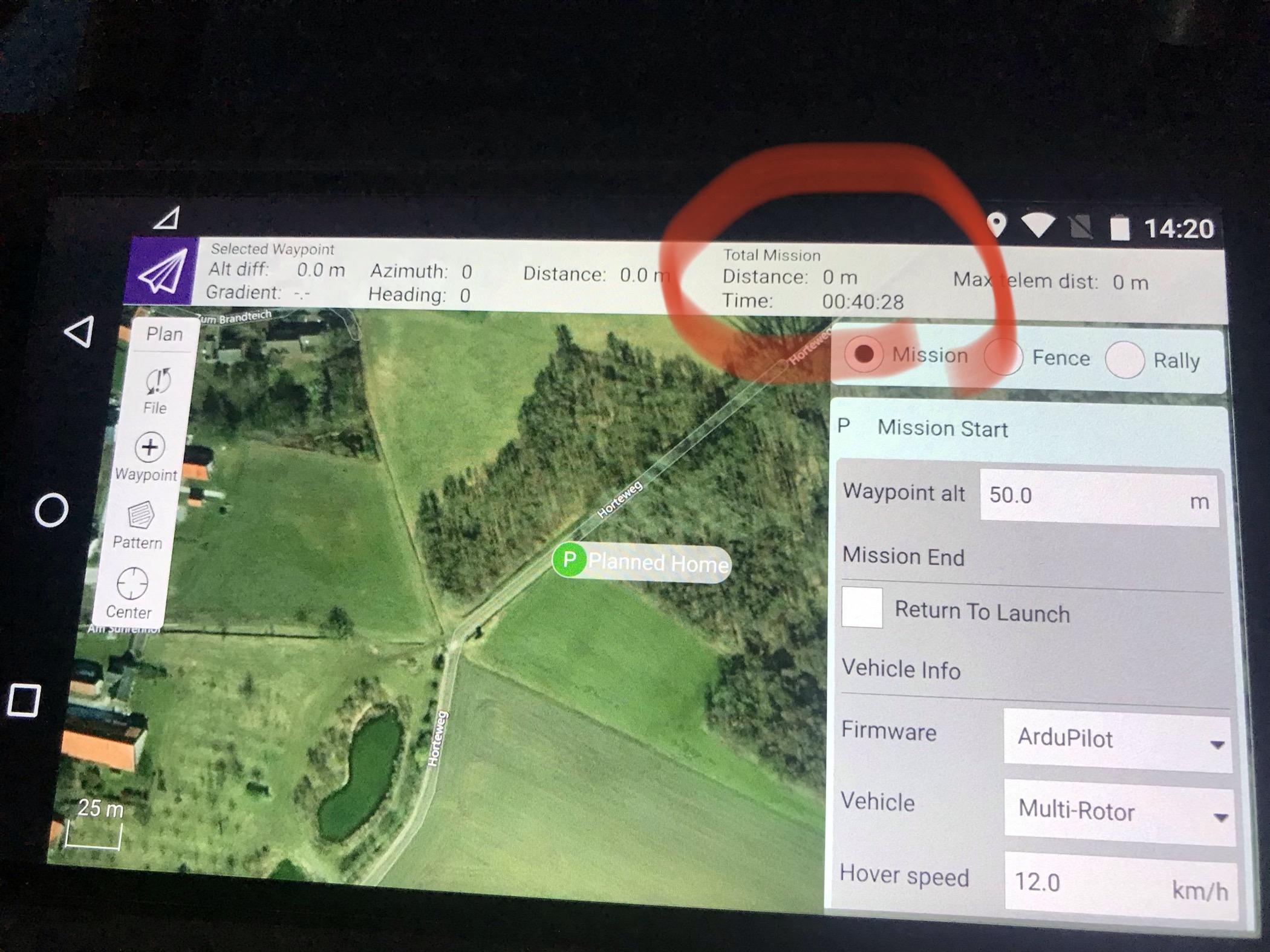
we have a similar issue with some of our units. Exact the same 40:28. But only with some of our units. A customer has one with the issue and one without. He searched in detail for the differences between the units but could not identify them.
I could not resolve it. No matter what, Herelink QGC always adds 40:28 min to the mission duration. Even if I create a mission with QGC on Windows PC. It is fine on the PC but after being copied to Herelink, 40:28 min are added to the duration by QGC on Herelink.
I have two Herelink units. The second one does not have the problem (never had).
I failed to identify any difference between the 2 units. Preflight-Checklist are deactivated on both units.
Only difference is: Arducopter 4.05 on the first copter and 4.07 on the second copter. Hard to imagine that this could make a difference as the problem occurs also offline without connection to an autopilot.
Would be great if you could get to the bottom of it.
thank you for the answer! I think if we have to combine our powers to get to the bottom of the issue.
I have all units running on 4.07 and 2 out of more than 15 have the issue. It occurred only this year and not before. This might hint to the Arducopter version running on the copters. Did you use Arducopter <4.07 with the copter which is working correctly before 4.07?
How did you update the HereLink, online only or with the image updating software?
Tobias
could you send me the Arducopter parameter files of your copters?
The only idea left with the HereLink configuration would be rally points or SmartRTL.