I was simply going to calibrate my radio but my CubePilot Board with Orange Cube stopped working. The only thing I changed was my RC16 .param. I had it inverted on my CubePilot Board but not on my radio and was changing it from inverted to not inverted, and afterward went into QGroundControl to calibrate the radio. I was also investigating why I can’t seem to get my sBuso to work, even though I am pretty sure it was configured correctly. I suspect it is related (see: sBuso Doesn't Seem to Work - Copter 4.0 - ArduPilot Discourse for details on how I have it setup.) Just before this happened, I had connected and disconnected several times like I normally do without any problems. I wasn’t getting any error messages in Mission Planner, so I didn’t think to check the light on the CubePilot Board and I only get the error message when using QGroundControl, which I prefer for calibrating my radio, so this could’ve been going on for longer than I know, but definitely within the last few days I’ve been configuring intensely.
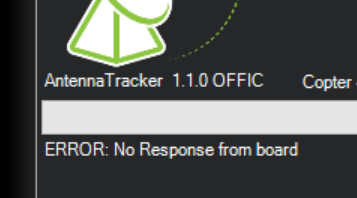
In QGroundControl, I get an error message:
“Your Vehicle is not responding. If this continues, shutdown QGroundControl, restart your Vehicle letting it boot completely, then start QGroundControl.”
The orange light on my CubePilot Board turns on when I first plug it in, but then turns off after about 10-20 seconds. This happens if I connect it to my computer via USB, or if I connect the battery; it makes no difference.
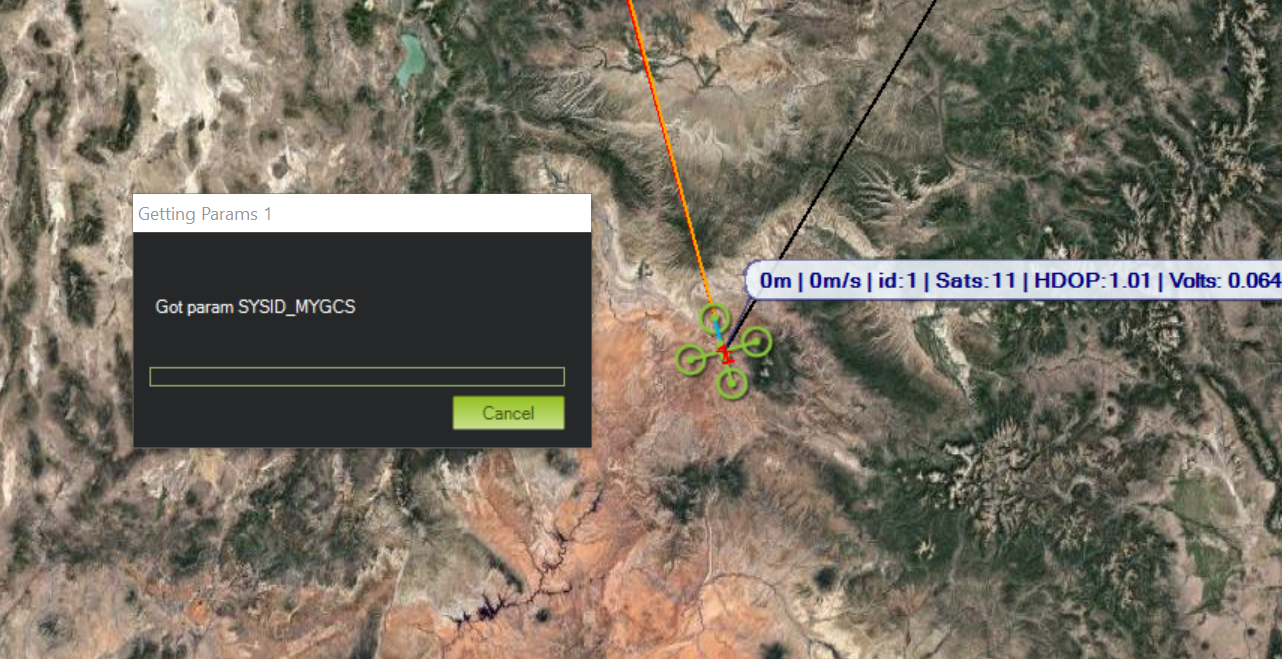
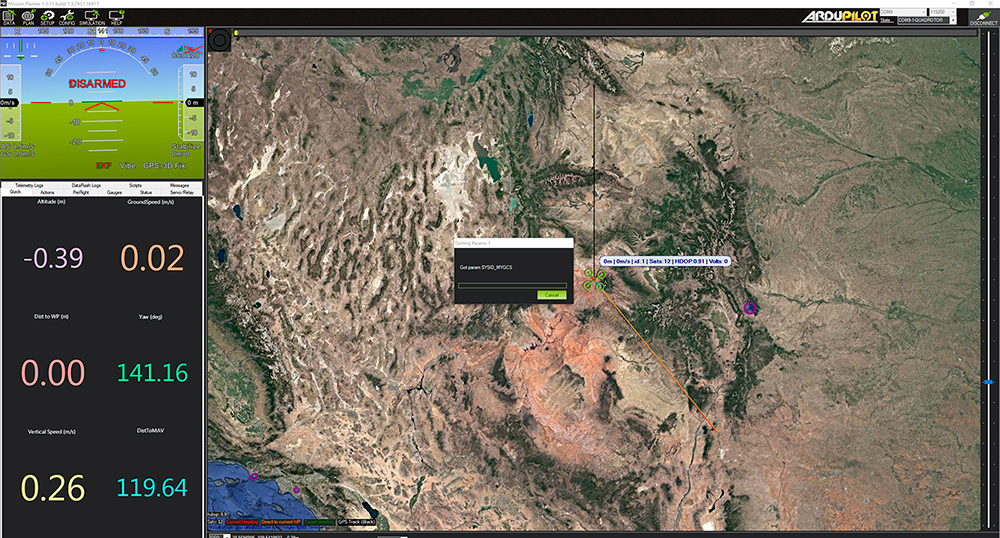
In QGroundControl, I can still see all the GPS’s, receivers are lit, working, and connected, voltage monitor still working, flight modes are still there and correct and all the rest of the settings. In Mission Planner, I can still read and write .params, see the gps results, everything else. but no light on the CubePilot Board, and still getting the message when using QGroundControl. I can repeatedly flash the firmware in QGroundControl. I can also flash the ChiBios in QGC, which I have done now more than once. My GPS units, 3DR telemetry radio, landing gear still retracts and deploys, everything still seems to work, but the board.

I’ve been configuring for months and the only thing I did different from what I normally do was to unplug the battery (red wire first) while it was still connected to the computer via the USB port on one of the times I connected. Could this cause my board to fry? Is my board fried?




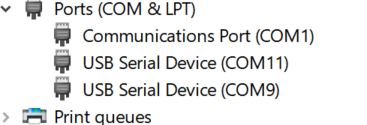
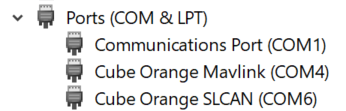
 About half the time, I am able to flash, but about half the time the board won’t fully boot up and I get stuck in an endless cycle of orange light staying on and won’t boot I have ot try like 10 or 20 times sometimes, and the board finally boots. It doesn’t matter which computer I use. Then something gets triggered, the board boots, and I can go back to the other computer and boot fine. When I try to flash firmware on the other machine, it won’t find the com port, which is something it never had trouble with. So something has definitely changed on my board/cube, and not in a good way.
About half the time, I am able to flash, but about half the time the board won’t fully boot up and I get stuck in an endless cycle of orange light staying on and won’t boot I have ot try like 10 or 20 times sometimes, and the board finally boots. It doesn’t matter which computer I use. Then something gets triggered, the board boots, and I can go back to the other computer and boot fine. When I try to flash firmware on the other machine, it won’t find the com port, which is something it never had trouble with. So something has definitely changed on my board/cube, and not in a good way.