Tuners, I need a bit of help figuring this one out.
New build. Test flights have been great with no payload. I mounted up a Gremsy S1V3 and A6500 today and went out to do more manual tuning now that I have a payload.
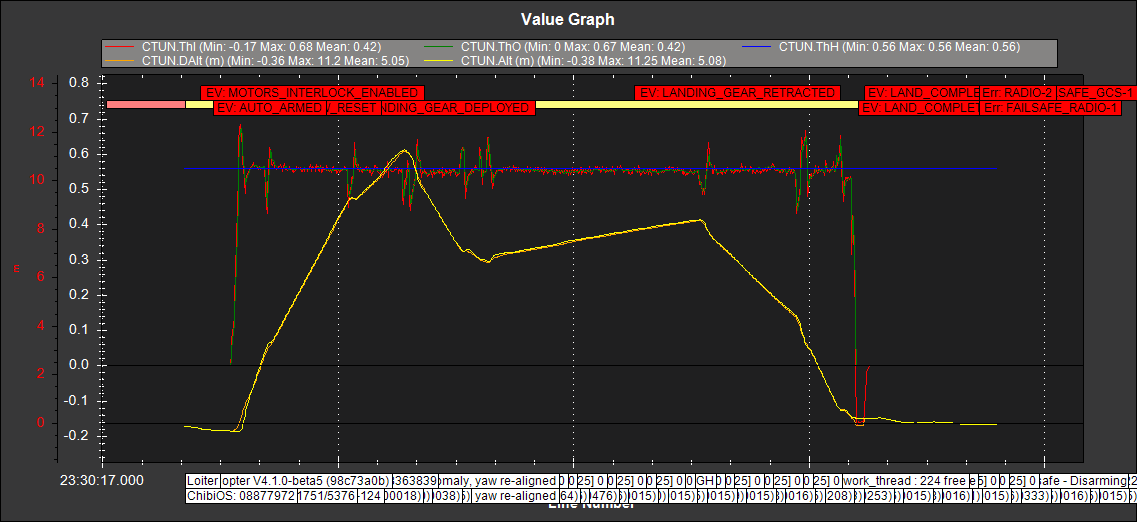
Now (with payload), when I increase throttle to ascend, the machine will keep ascending slightly after going back to 50% on the throttle stick.
Same with respect to descents, the machine will keep descending slightly at 50% stick and I have to increase throttle to make it stabilize and maintain altitude.
It flies great otherwise.
Loiter mode for these tests as I’ll be in Loiter most of the time.
Logs are here: