On the chance that this may be an issue with my Orange Cube or it’s mounting, I thought I’d make this report.
The copter in question is a Hexsoon TD-650 with an Orange Cube and ADSB carrier board.
The BIN files report excess vibration. IMU-0 and IMU-1 report excess vibration in the X axis. IMU-2 reports excess vibration in the Z axis.
As a relative newcomer, I don’t know how much vibration is “too much” vibration. All I can tell is that each IMU reports one axis with higher vibration than the other two. And one of the IMU’s reports this issue on different axis than the other two.
I’d appreciate any thoughts or advice on this topic. Perhaps the vibration levels reported are acceptable. Perhaps I need to investigate an issue with mounting, props, or some other issue. Or maybe the Orange Cube is experiencing an anomaly.
IMU 0 & 1 are vibration isolated and #2 is not. Also the IMUs have different frequency responses so they will respond differently to different frequencies of vibration. This is all by design to better detect issues with the aircraft. The autopilot is doing exactly what it is supposed to be doing by detecting and reporting issues. You need to look in the frequency domain and resolve the issues that are causing vibration.
The wiki says that vibrations over 30 are too much, but many will say you need to be much lower. Below 15 at least.
The first thing I always look at is the clipping. In that file the clipping is 0, and that’s good. That means the vibrations that are being detected aren’t overwhelming the IMU.
Here’s my thoughts on vibration analysis:
If X AND Y are both high, then you may have an issue with a motor bearing or prop balance. Or you may need more/better overall vibration damping for your FC.
If X OR Y is high then you may have an issue with your FC mounting. Maybe a wire or is bouncing on the FC or restraining it. Or you maybe your vibration damping works better one way than the other.
If you have a Z vibration then you may have a track issue with propeller (bent blade) or vertical play in a motor.
Of course these are just my starting points when I’m looking at a vibration. Others will take different approaches. Also consider that some flight conditions/airframes will have different natural vibrations. The vibrations on your machine look good in a hover, but the X goes up with speed. Perhaps an aerodynamic issue on the airframe, or the wind, or… Unless this is showing up as jello or other issues in your video then I’d say this is livable.
I’m not sure why your IMUs are reporting different vibration directions.
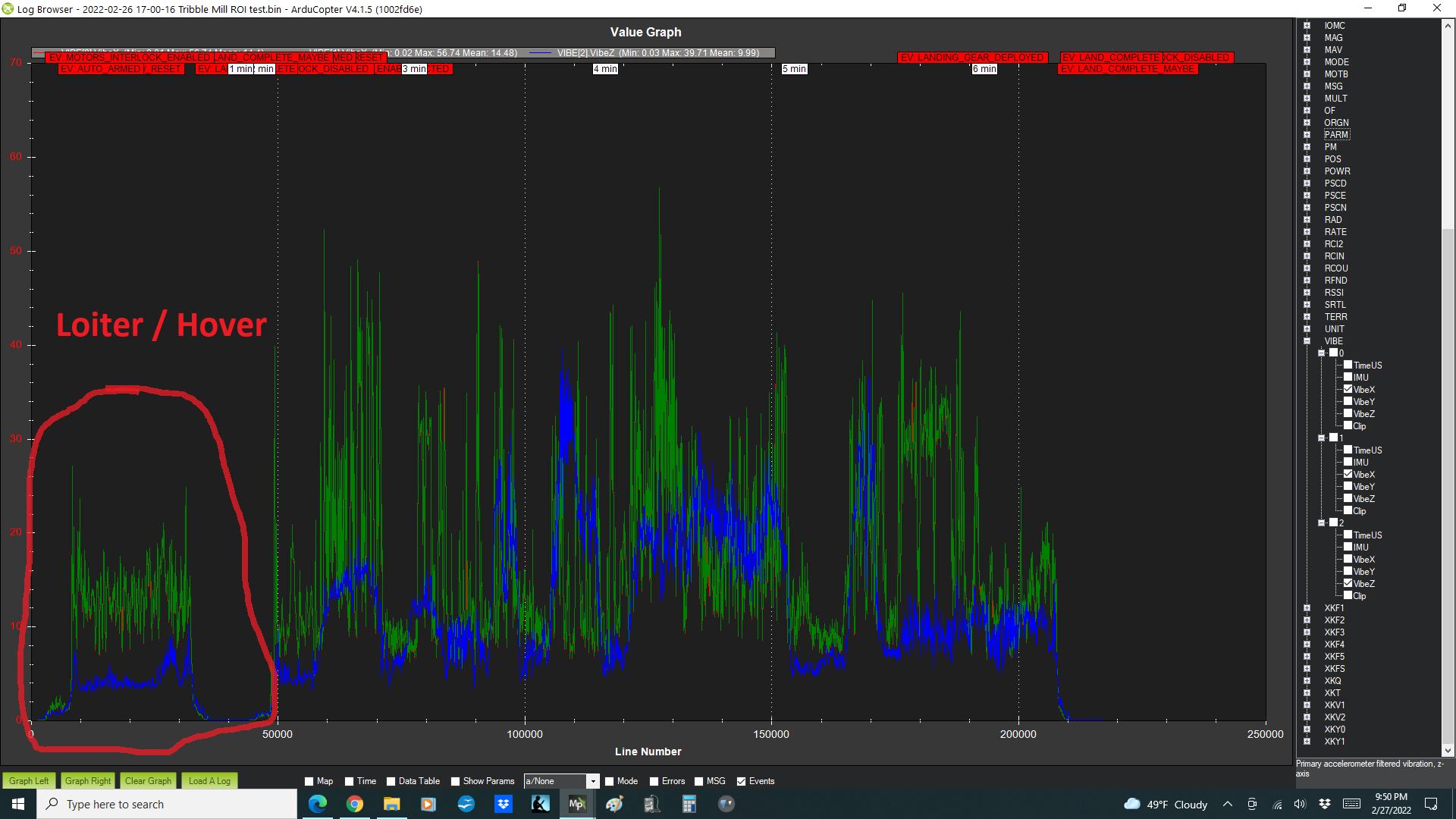
Following up on the response from Allister, I charted the three errant axis.
The BIN file records two flights - first a hover in LOITER for a minute or so - then landing. Then the test flight where I was testing my Alexmos gimbal’s ability to perform ROI targeting.
You’ll see from the chart that when in hover the vibrations are under 30 - acceptable per Allister’s reference to the wiki.
So it seems that perhaps it’s the aerodynamic forces on the gimbal that are causing the vibration.
I felt a bit sheepish I’d missed that in the docs. I guess it’s time to start at the beginning again and read the whole thing.
Anyway - turns out there is no “clipping” reported in my bin file - so for now, I’m not in any particular danger. I will work to reduce the vibration - but now I can prioritize it a bit further down on my list.