Hi guys,
I am from Zagreb, Croatia. Surveyor by profession and doing a lot of aerophotogrammetry work. Recently, I’ve bought a Lidar system and build up a brand new drone for that heavy payload. The frame is Y6 with T-Motor U8Lite KV150 motors and 30" lower and 28" upper foldable Foxtech “Optimal” props. We did some PID adjustments but I am still not too happy with the way it flies. The drone weights 12 kg with the payload and two 14A 6S batteries. The distance from center of prop to the other one is 97 cm. Since I was afraid to do the Auto tune because of the large props with the low KV motors, we did our best so far. Can you, please suggest me a person near Zagreb that would be able to make that perfect tuning for such an expensive drone and more important way too expensive payload.

AutoTune does magic if filters and AutoTune aggression is set up correctly.
Hi Hdtechk,
Do you have any suggestion for that setup before Autotune regarding this drone configuration?
What would be the correct setup of filters and autotune aggression?
I’ve read somewhere about autotune pushing motors out of sync and crashing the drone.
Darko
Of course autotune without lidar but a bottle of sand at its place.
Set filter to 10 hz and AGGR to 0.05 to start.
I don’t know the new U8II but the old U8 170kv don’t work well at 6S, needed 8S at least, and U8 150kv at 6S for me never go to fly very well.
And don’t fly with wind
I hope I’m wrong
Hi Agridroni (Italy?)
It is U8 LITE Kv150 that is really efficient on 6S, on 12S it works only with 22" props and efficiency is 70% less. Of course, I just installed Lidar for the photo session and all the testing is done with the dead weight. Thank’s for your suggestions.
Yes darko, I’m from Italy. Remember that engines on the paper are one thing, in the reality are another. If you don’t want to change engines (I hope you have the 12S esc) I suggest you to switch to 8s (not easy for batteries). Another solution is reduce the the propeller size, using 28" with different pitch. My impression is that it’s a very unstable system for a payload expensive as a lidar, in these cases I prefer less efficiency and more stability. My 2 cts
Hi Antonio,
Unfortunately I have 6S ESCs. I am thinking about one more try to find better PID’s. I’ll try to make AutoTune with recommended filter and aggression. My finger will be very close to the stabilize switch and hope for the best. Actually that drone had a crash due to instability a week ago, I was not fast enough with the stabilize switch. Now, I have better parameters set and it is flying now but I am still not too happy. Guys from the “ONE DRONE” - Ljubljana, Slovenia, have the same opinion about the voltage as well as the prop size.
I am happy with the flight time which is 30 min and if I reduce the prop size it will drop to 15 min which is definitely not enough. Is there any idea how to get 30 - 40 min flight time with the 2.5 kg of payload?
I was thinking about making regular foldable hexa frame, will it solve the instability problem if I leave the similar fixed 28" props and set the voltage to 8S?
The setup I have now is neat and it is fixed frame that fits in my trunk.
Hi Darko.
for me switching to 8s is the best compromise to reduce the costs of change. For long flights the solution was U8 100kv at 12S. Between flat 6 and Y6 does not change to much, flat is a little more efficient but more heavy, Y6 more stable with the wind. Whith a lidar thinks to use a parachute it’s a good insurance.
Hi Antonio,
I will give just one more try this Friday to Autotune for the first time. If it gets crashed, it is a good time, without the Lidar. I’ll do it regarding all the good advice I’ve seen here and hope for the best. After that I will make some long regular Auto missions to test it in the real environment and real conditions. Next step will be Galaxy parachute installation and the last step will be the test flight with the real payload. As advised by you and some other guys, I’ve ordered the new quad setup with the parachute from Kopterworx. That order is on hold for the test time, but if anything bad happens it will be activated.
Hi Darko, news about your Y6 autotune?
Those are my news. A Guy from England, Justine, answered me with the magic words for tuning large multirotors:
BEFORE AUTOTUNE :
- Roll and Pitch filters = 10 Hz
- Autotune_aggr = 0.05
- ATC_THR_MIX_MAX = 0.9
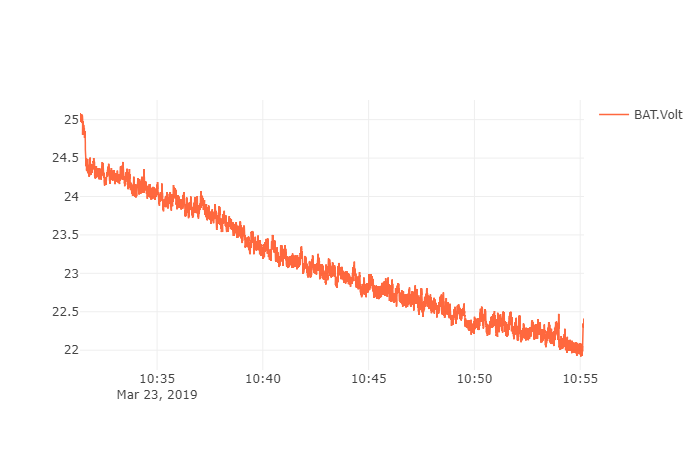
With that setup AutoTune went perfectly ok and now I am using those parameters. I was nicely surprised with the flight time. Few days ago I have tested the flight time in LOITER and my batteries lasted for 27 min before the limit of 21.4 V. Yesterday, in real flight I had 22.2 V after 24 min of flight with the speed of 10 m/s and 28 Waypoints… So there was a lot of accelerating, braking, making turns and straight lines. All of that was done with the full payload dummy of 2.7 kg. When I connected the batteries for the storage charge it was done in minutes with only 200 mA of charge.
So, I’m done. Now I must make few corrections like balistic parachute on the front, displacement of data link antennas and I can make my first flight with the real payload. In a week…
Darko
One more important thing… I have limited roll and pitch angles to 20 Deg. There is no need for acrobatic flights, the purpose of this drone is to carry the Lidar and to survive it. When in straight flight without wind the attack pitch angle is about 10 Deg for the speed of 10 m/s which will be my top speed for the future missions.
Of course, the 1. and 2. were your suggestion but Justine added the third line which did make the difference too.
well done! I am happy for your result 
Hi Darko,
Nice copter btw.
Why are you using bigger lower props and smaller upper ones?
Where is the logic behind?
Is not just a way around?.. for lower setup: 10-20% higher KV, more pitch, smaller props…
You already have accelerated airflow from upper props.
Hi Vibonsky,
I don’t remember the real theory or the article, but I’ve read it somewhere on the net. Something like the lower props are working in the “dirty” accelerated and turbulent air and they need to spin faster to get the same propulsion as the top ones, or keep the same speed but have a bigger props. With that combination of 28" and 30" I am happy with the flight time I can get from my drone. With the current battery setup (2x14A 6S) I can stay in Loiter for 27 min before reaching 21.4 V where I have decided to be my Must Land point. In flight, I am not sure but looks like 34 min. It is more efficient in flight than in Loiter mode. It all looks fine and all my motors came down COOL and all ESC’s had the same temp of about 35-40 deg C. The total weight of the drone with the payload and batteries is about 12 kg and max trust of the drone is in theory 42 kg, haven’t tested and never will.
Darko
In my x8 I also use a smaller prop at the top with better efficiency (I tested many configurations).
@Darko
Wich motor order diagram do you use, Y6A, Y6B or Y6F?
I watched the foto in the top et nearly sure it’s Y6A 
Yes it is the old Y6a.
And here you can find Maiden flight with the Lidar installed on it.
No parachute… Just paid for the insurance.
It fly very well, compliment! Good solution the insurance 