hi Shawn
I’m analyzing everything you advised me in early April. For the weather and the limited time to devote, they don’t allow me to have an immediate reaction ![]()
In the meantime I am trying some things and following your coins, I see that the system starts to work better.
At the same time I am also building a quad and many parameters suggested by you find space in this frame.
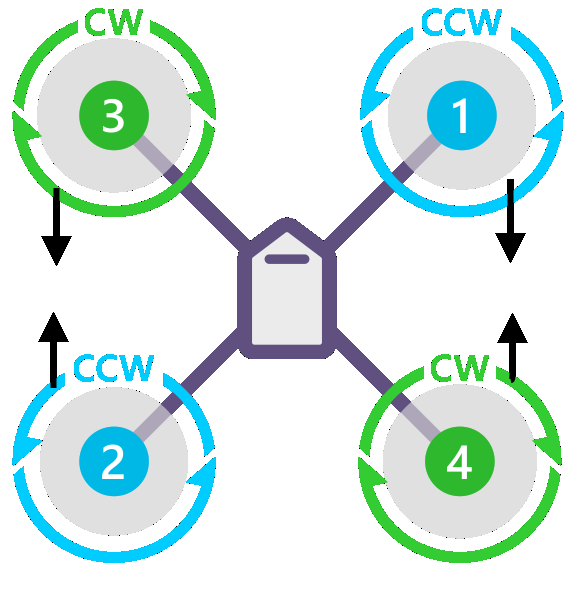
I need a little info: to increase stability, in addition to the natural dihedral of 5 degrees, can I orient the motors by 2 or 3 degrees? and in which direction? do you recommend it?
I enclose a diagram where the orientation of the motors is indicated by the arrows (joining motors 1/4 and 2/3 while diverging 1/3 and 2/4