Hi, our quadcopter uses a Pixhawk Cube with a Here2 GPS, and an Odroid XU4 onboard. We are having quite a few crashes where the copter starts acting weird (see video), and crashes. We’ve done calibration before every flight and Mission Planner shows no warnings. I’ve attached the logs for the latest flight (we first did a brief takeoff and land, and the second takeoff was the one where it crashed). Any help diagnosing would be appreciated.
Hi, thanks for taking the time to look at the logs. We haven’t touched the PID settings, is there a guide on how to do this? Also, we have many mode changes because we are flying with an onboard computer, and we only use the RC for setting an emergency land mode.
If thats are the first flight of that drone (I think so), I recomend you not to use any mode than Alt Hold or Stabilize (depend on your remote, THR and your hability to drive it). For the tune up you need to flight manualy. YOu must have the control always to avoid any damage
Any flight mode that use GPS or bad failsafe setup can finish the drone on the wall or very far away if you havent setup correctly.
On youtube there are a lot of PID tuning videos, but be careful, there are a lot that are not correct. So pls check several videos first and compare with the ones on the ardupilot documentation.
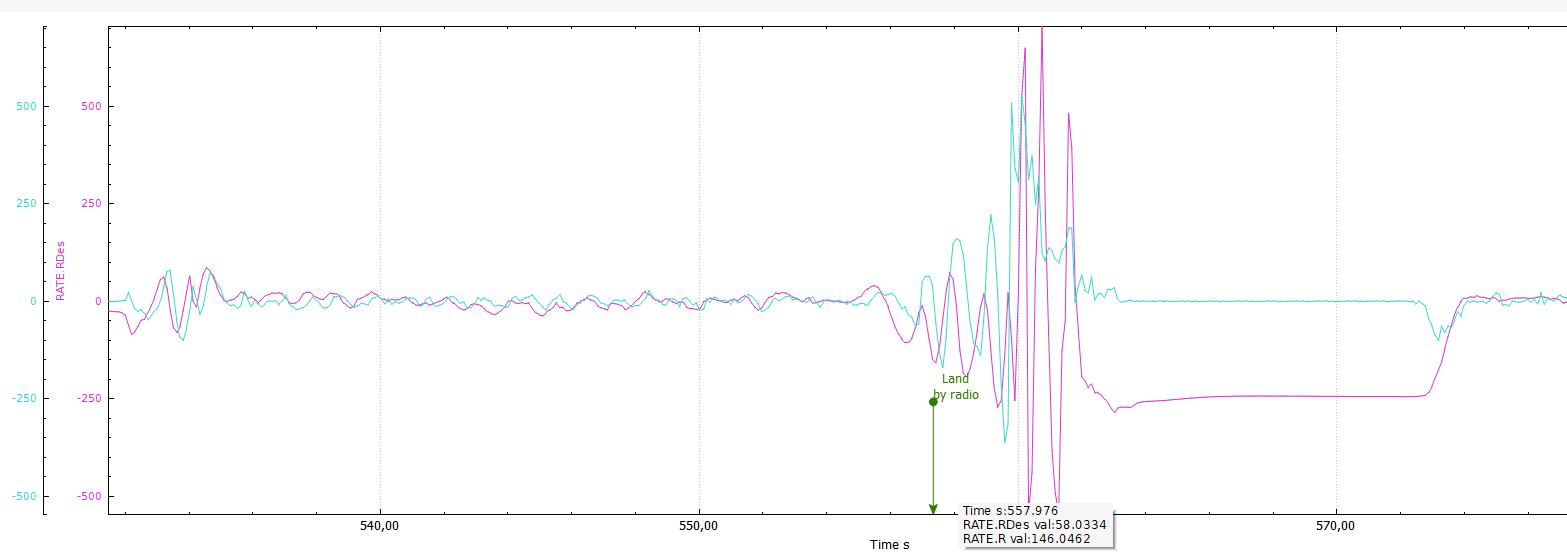
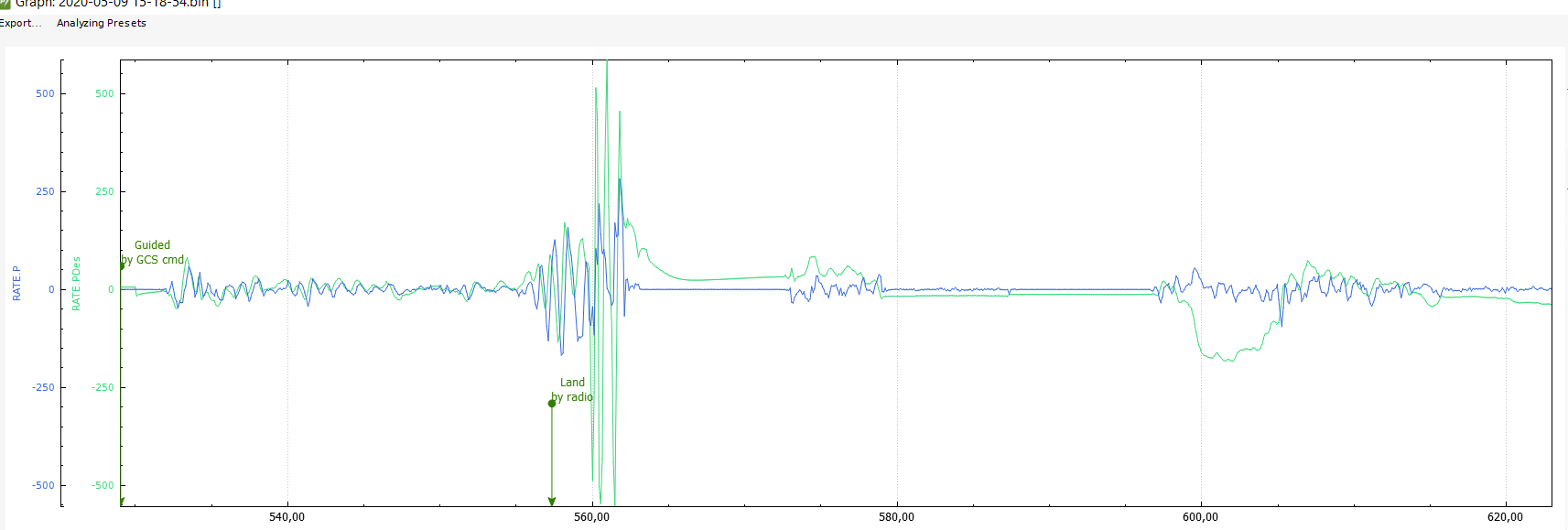
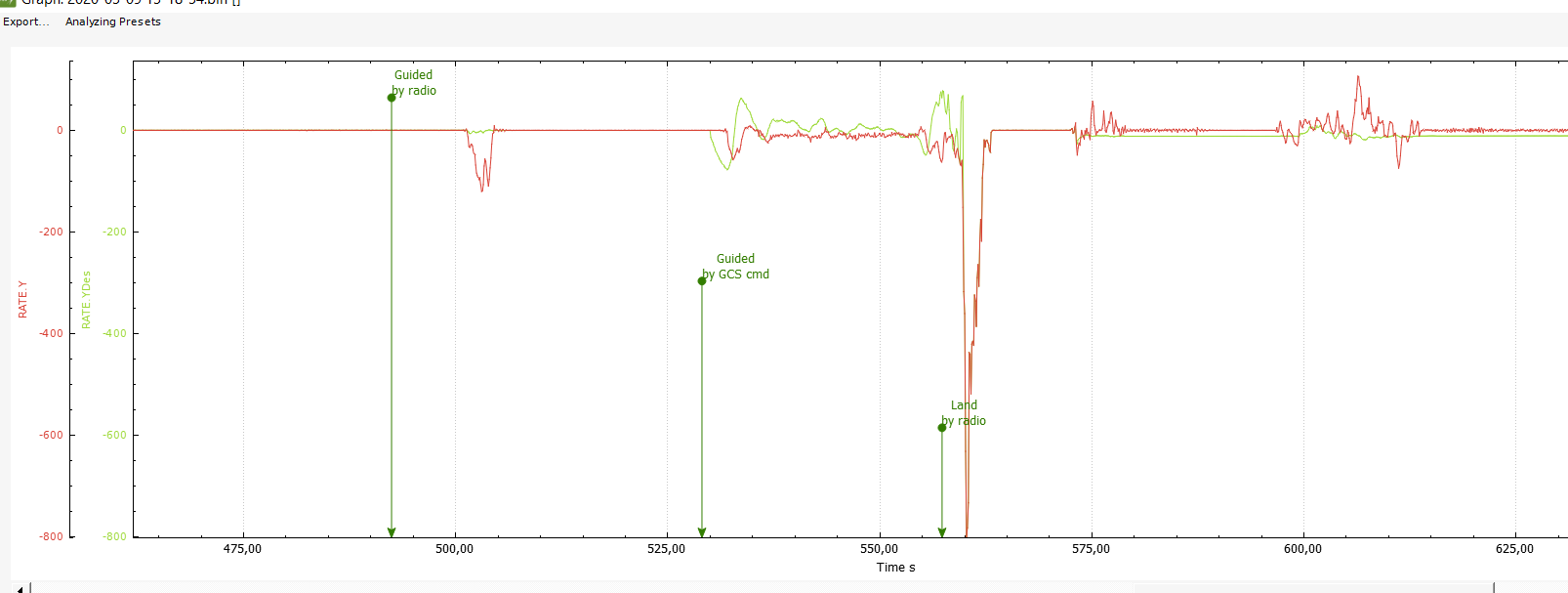
and becareful with the autotune, because your PIDS are very soft, I never did the autotune with that behavor.
About the graph, im using APM2 software (just for loging graphs), I like it more than the MP graphing tool.
Not yet, on the weekend we’ll start tuning and testing. I posted on both forums because I didn’t know how active either one was, luckily I’ve received a lot of tips on both.