I’ve looked at the video and studied the log.
Set these before going further:
SERVO7_FUNCTION,0
SERVO8_FUNCTION,0
Having them designated as motor outputs could be quite confusing, and possibly a problem.
Go to the MissionPlanner radio calibration section. Check that for pitch, the green bar should move in the opposite direction to the transmitter’s physical stick. This is not the default for many transmitters.
Why ATC_THR_MIX_MAX,0.9 ? Set this back to default 0.5
What motors and ESCs do you have?
We might need to change some parameters. If it’s T-Motor Alpha ESCs you might need MOT_THST_EXPO,0.6 or MOT_THST_EXPO,0.4 for Flames. Check this before progressing to the motor tests because the MOT_SPIN_ARM and MIN can be affected.
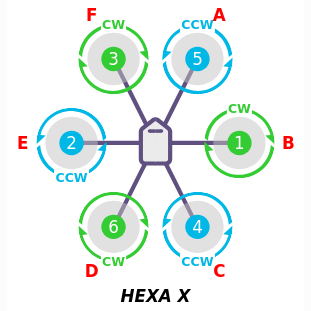
Carefully go over the motor order and spin directions.
Make extensive use of the MissionPlanner motor test section.
Check
MOT_SPIN_ARM and get those motors spinning relibaly but as slow as possible. Add +0.03 and set
MOT_SPIN_MIN
What batteries do you have?
I think there needs to be a few related adjustments made.
Why SERIAL0_BAUD,57 ? usually the USB port would 115.
Set these until we know more and there’s stable flight:
COMPASS_LEARN,0
INS_HNTCH_BW,10
INS_HNTCH_FREQ,35
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.10
INS_LOG_BAT_MASK,1
LOG_BITMASK,180222
Be aware that with the harmonic notch filter “less is more” in most cases and we should just do the minimum required.
If you think PIDs are a problem after all those other changes, then try these:
ATC_ANG_PIT_P,6.0
ATC_ANG_RLL_P,6.0
ATC_RAT_PIT_D,0.006
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.006
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
Set a transmitter switch and Channel to be Land mode - the copter will often land quicker and safer, and disarm, quicker than you can.
Motor Emergency Stop is another good switch to have set up. RCxx_OPTION,31
Let us know how you go.