Copter setup/ integration:
All up weight is 2950gms
Motors t-motors 3508
Esc 40amps hobbywing x rotors opto
Propeller 15x5 (t-motors)
telemetry herelink
RC X9D taranis fr sky (tx) {Rx L9R}
BATTERY 6S TATTU 10000OMah 15C
FLIGHT CONTROLLER CUBE BLACK
GPS HERE 3 DUAL GPS (2GPS)
As I was flying the copter with herelink I was not happy with the autotune gains.
So on 22-10-2020, I choose to do the gain tuning my taranis while herelink was hooked with the cube for sending/ receiving telemetry data on mission planner running on Windows PC.
As I wanted to Inflight manual tuning I hooked my X9D to my CUBE.
Configured Channel 6 on tx on pod to change value inflight.
I completed my tuning my in stabilize mode step1: Stab roll/pitch kp & step:2 Rate roll/pitch kp.
After tuning and flying for some time in stabilize mode I shifted to Atthold and finally Loiter after 3-5 minutes flying at about 20m-30 away.
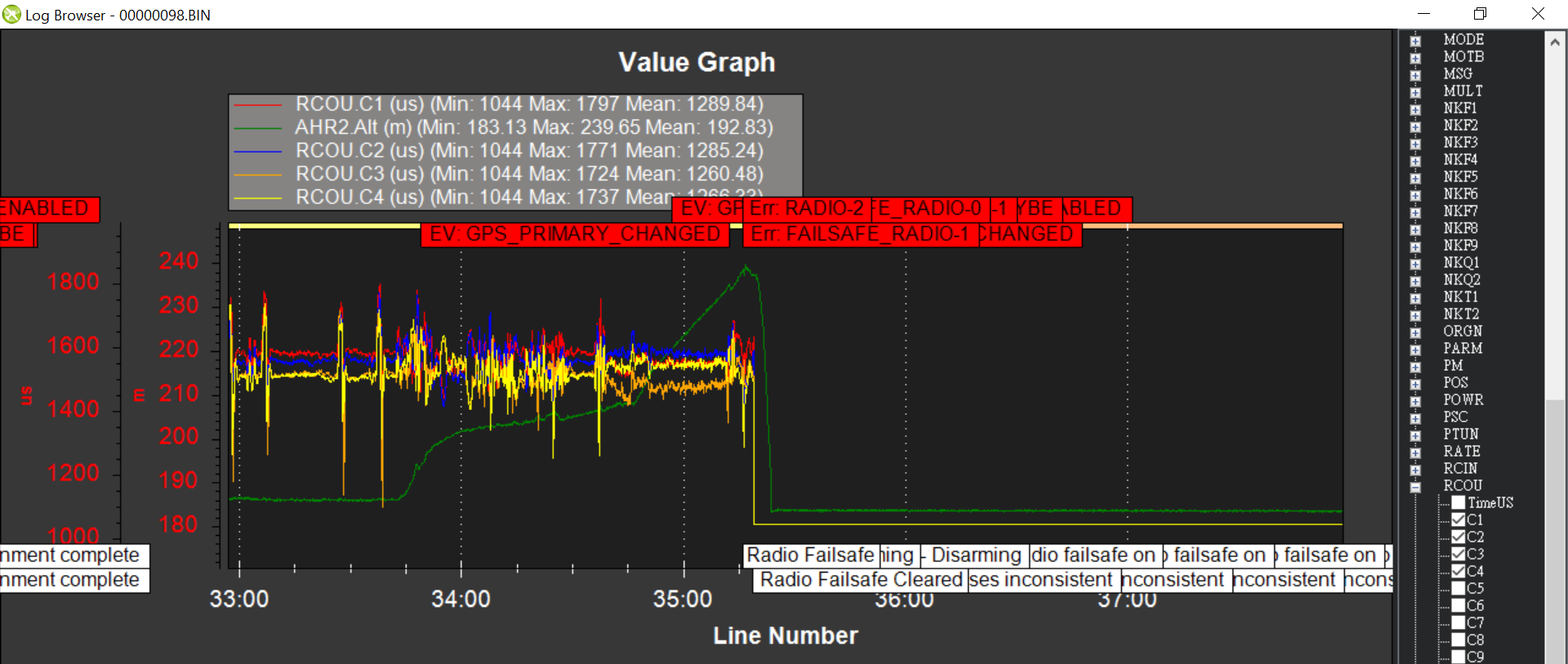
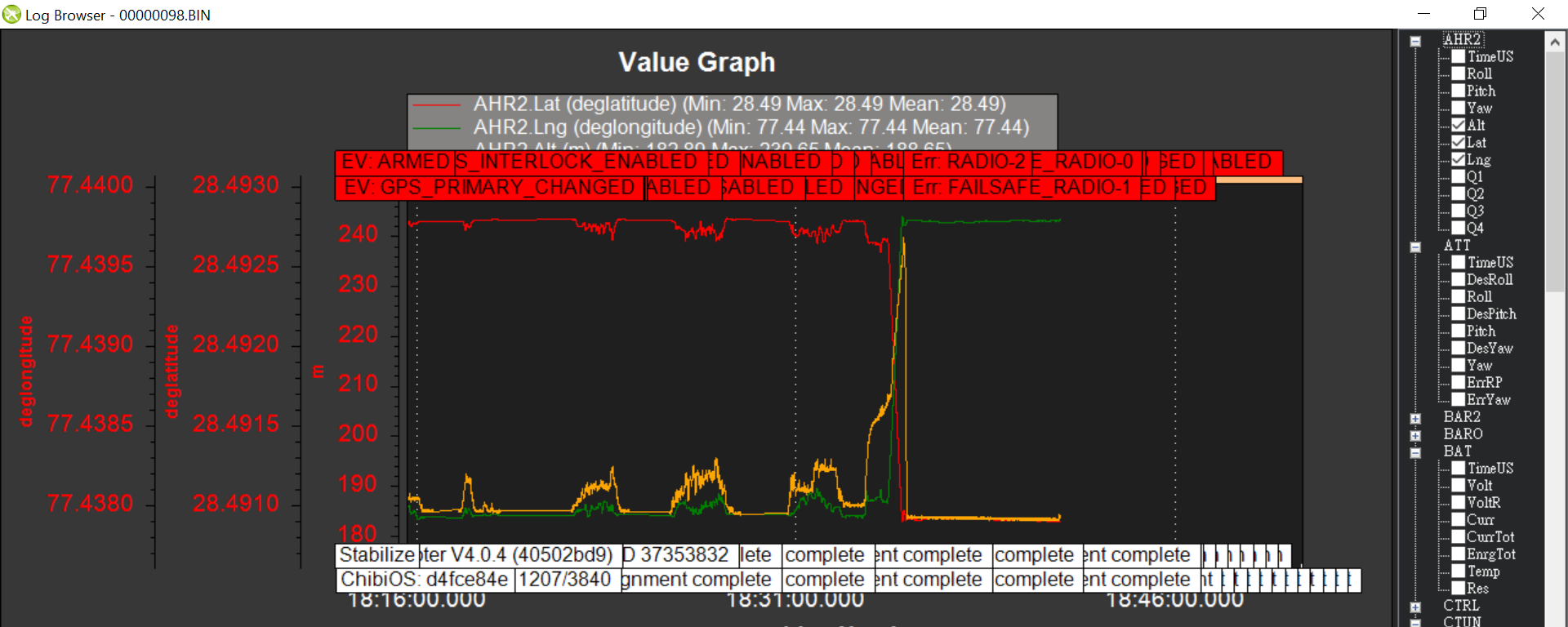
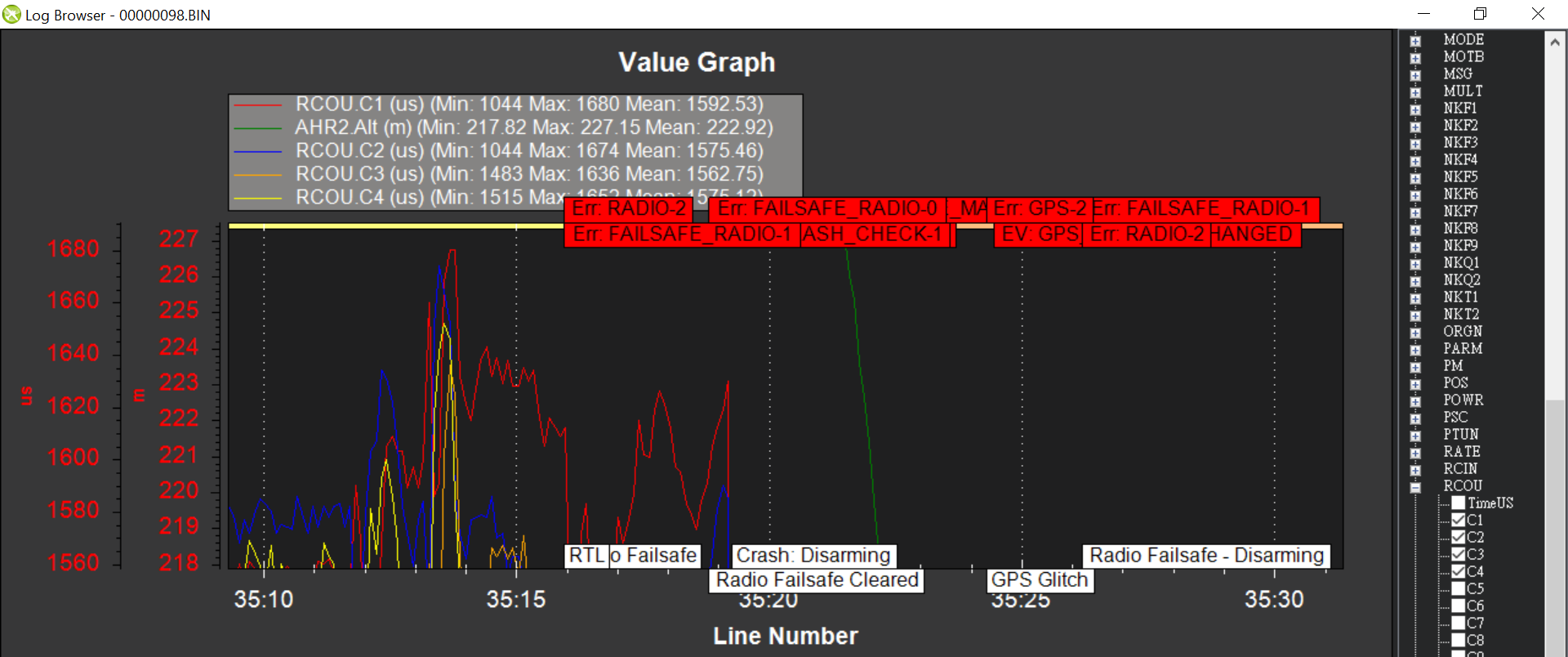
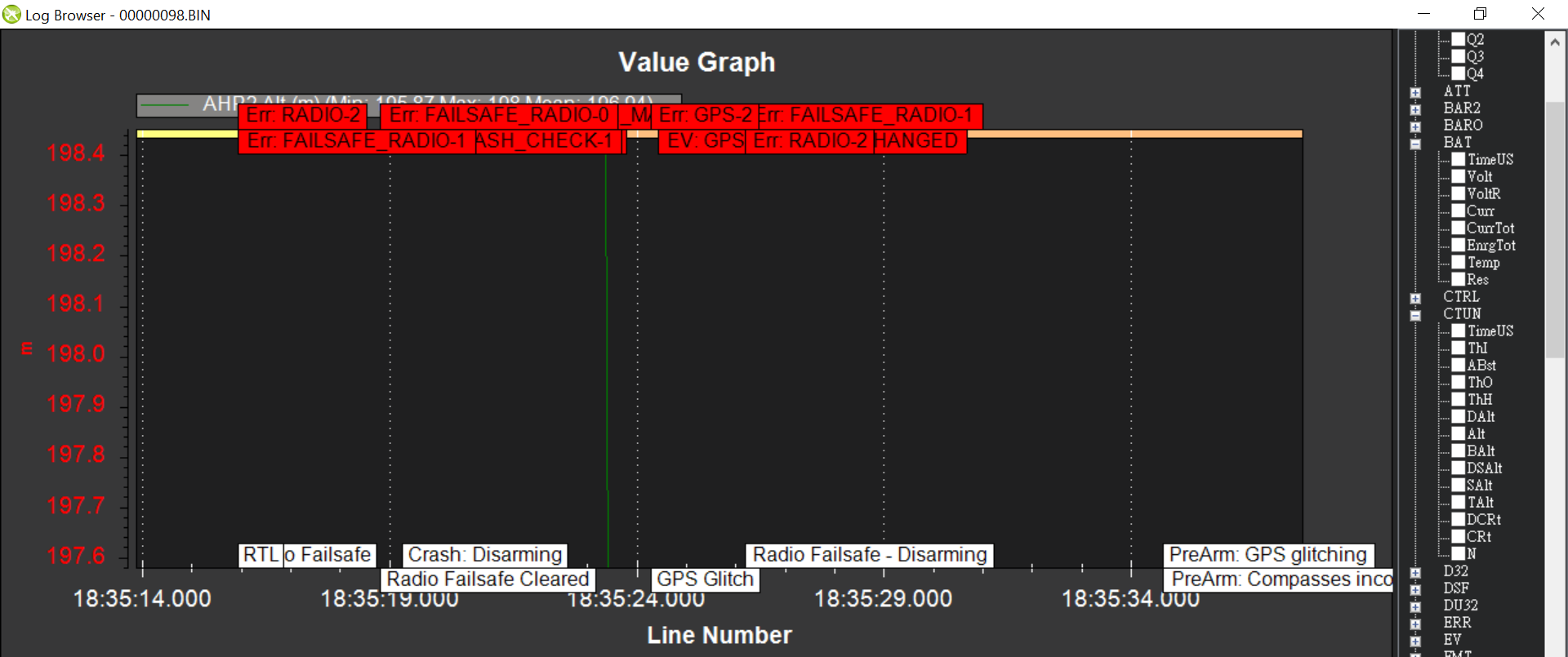
So at a height of 40m I flew the copter 300m and then I started flying back suddenly fell from sky.
Log File C:\Users\AG\AppData\Local\Temp\tmpF6F.tmp.log
Size (kb) 41979.3427734375
No of lines 476764
Duration 0:28:42
Vehicletype ArduCopter
Firmware Version V4.0.4
Firmware Hash 40502bd9
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:127.44, Y:-338.08, Z:-2.46)
WARN: Large compass offset in MAG data (X:127.00, Y:-338.00, Z:-2.00)
Large change in mag_field (45.42%)
Max mag field length (561.53) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: CRASH FS_THR GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = GOOD - (Mismatch: 0.71, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1348, 1333, 1311, 1309]
Average motor output = 1325
Difference between min and max motor averages = 39
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = FAIL - 63 slow loop lines found, max 7.70% on line 248834
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
logs: https://drive.google.com/file/d/19N3AbwV1dBD_cx3s0oiOpPy097O8B_P8/view?usp=sharing